@@ -0,0 +1,59 @@
|
|||||||
|
name: Release CLI
|
||||||
|
|
||||||
|
on:
|
||||||
|
push:
|
||||||
|
tags:
|
||||||
|
- v*
|
||||||
|
|
||||||
|
jobs:
|
||||||
|
release:
|
||||||
|
permissions:
|
||||||
|
contents: write
|
||||||
|
runs-on: ubuntu-latest
|
||||||
|
steps:
|
||||||
|
- uses: actions/checkout@master
|
||||||
|
|
||||||
|
- name: Install latest rust toolchain
|
||||||
|
uses: actions-rs/toolchain@v1
|
||||||
|
with:
|
||||||
|
toolchain: stable
|
||||||
|
|
||||||
|
- name: Compile
|
||||||
|
id: compile
|
||||||
|
run: |
|
||||||
|
OUTPUT_DIR="built/output"
|
||||||
|
mkdir -p "$OUTPUT_DIR"
|
||||||
|
echo "BUILT_ARCHIVES=$OUTPUT_DIR" >> $GITHUB_OUTPUT
|
||||||
|
|
||||||
|
ARTIFACTS_FOLDER="${GITHUB_REPOSITORY#*/}_${GITHUB_REF_NAME}"
|
||||||
|
mkdir $ARTIFACTS_FOLDER
|
||||||
|
|
||||||
|
set -x
|
||||||
|
|
||||||
|
make build_cli
|
||||||
|
|
||||||
|
BIN=maccel
|
||||||
|
ARCHIVE=$BIN-cli.tar.gz
|
||||||
|
BIN_PATH=target/release/$BIN
|
||||||
|
|
||||||
|
strip $BIN_PATH;
|
||||||
|
|
||||||
|
cp -r $BIN_PATH LICENSE README.md $ARTIFACTS_FOLDER
|
||||||
|
|
||||||
|
tar -caf $ARCHIVE $ARTIFACTS_FOLDER/*
|
||||||
|
|
||||||
|
mv $ARCHIVE $OUTPUT_DIR
|
||||||
|
|
||||||
|
- name: Name Release
|
||||||
|
run: echo "RELEASE_NAME=${GITHUB_REPOSITORY#*/}-cli ${GITHUB_REF_NAME#v}" >> $GITHUB_ENV
|
||||||
|
|
||||||
|
- name: Release
|
||||||
|
uses: softprops/action-gh-release@v1
|
||||||
|
if: startsWith(github.ref, 'refs/tags/')
|
||||||
|
with:
|
||||||
|
generate_release_notes: true
|
||||||
|
name: ${{ env.RELEASE_NAME }}
|
||||||
|
files: |
|
||||||
|
${{ steps.compile.outputs.BUILT_ARCHIVES }}/*
|
||||||
|
env:
|
||||||
|
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||||
@@ -0,0 +1,18 @@
|
|||||||
|
name: Tests
|
||||||
|
|
||||||
|
on:
|
||||||
|
push:
|
||||||
|
branches: ["main"]
|
||||||
|
pull_request:
|
||||||
|
branches: ["main"]
|
||||||
|
|
||||||
|
jobs:
|
||||||
|
test_core_function:
|
||||||
|
runs-on: ubuntu-latest
|
||||||
|
|
||||||
|
steps:
|
||||||
|
- uses: actions/checkout@v3
|
||||||
|
- name: Test acceleration function
|
||||||
|
run: make test
|
||||||
|
- name: Test CLI
|
||||||
|
run: cargo test --all
|
||||||
@@ -0,0 +1,23 @@
|
|||||||
|
# artifacts
|
||||||
|
.*.cmd
|
||||||
|
*.ko
|
||||||
|
*.mod
|
||||||
|
*.mod.*
|
||||||
|
*.symvers
|
||||||
|
*.order
|
||||||
|
*.o
|
||||||
|
|
||||||
|
# build
|
||||||
|
.cache
|
||||||
|
|
||||||
|
# misc
|
||||||
|
compile_commands.json
|
||||||
|
|
||||||
|
|
||||||
|
# Added by cargo
|
||||||
|
|
||||||
|
/target
|
||||||
|
|
||||||
|
# large generated driver snapshots (not required in this fork)
|
||||||
|
driver/tests/snapshots/*__*.snapshot
|
||||||
|
driver/tests/snapshots/SENS_*.snapshot
|
||||||
@@ -0,0 +1,165 @@
|
|||||||
|
# Agent Guidelines for maccel Repository
|
||||||
|
|
||||||
|
This document outlines essential commands and style conventions for agentic coding in this repository.
|
||||||
|
|
||||||
|
## 1. Project Structure
|
||||||
|
|
||||||
|
- `driver/` - Linux kernel module (C) for mouse acceleration
|
||||||
|
- `cli/` - Rust CLI binary for controlling the driver
|
||||||
|
- `crates/core/` - Core Rust library shared by CLI and TUI
|
||||||
|
- `tui/` - Terminal UI component using ratatui
|
||||||
|
- `site/` - Documentation website (Astro/TypeScript)
|
||||||
|
- `udev_rules/` - udev rules for device permissions
|
||||||
|
- `PKGBUILD` - Arch Linux DKMS package definition
|
||||||
|
- `install.sh` - Installation script
|
||||||
|
|
||||||
|
## 2. Build, Lint, and Test Commands
|
||||||
|
|
||||||
|
### Driver (C Kernel Module)
|
||||||
|
- `make build` - Build the kernel module
|
||||||
|
- `make build_debug` - Build with debug symbols (`-g -DDEBUG`)
|
||||||
|
- `make install` - Build and load the kernel module
|
||||||
|
- `make reinstall` - Uninstall and reinstall module
|
||||||
|
- `make uninstall` - Remove module from kernel
|
||||||
|
|
||||||
|
### CLI (Rust)
|
||||||
|
- `cargo build --bin maccel --release` - Build CLI binary
|
||||||
|
- `make dev_cli` - Run CLI with auto-reload using cargo-watch
|
||||||
|
- `make install_cli` - Build and install CLI to /usr/local/bin
|
||||||
|
- `make uninstall_cli` - Remove CLI binary
|
||||||
|
|
||||||
|
### udev Rules
|
||||||
|
- `make udev_install` - Install udev rules
|
||||||
|
- `make udev_uninstall` - Remove udev rules
|
||||||
|
- `make udev_trigger` - Reload udev and trigger device discovery
|
||||||
|
|
||||||
|
### Tests
|
||||||
|
**All Tests:**
|
||||||
|
- `make test` - Run all C driver tests
|
||||||
|
- `cargo test --all` - Run all Rust tests
|
||||||
|
|
||||||
|
**Single Test:**
|
||||||
|
- `TEST_NAME=<pattern> make test` - Filter C tests by filename
|
||||||
|
- `cargo test <test_name>` - Run Rust test by name
|
||||||
|
- `cargo test --package maccel-core <test_name>` - Run test in specific crate
|
||||||
|
|
||||||
|
### Linting & Formatting
|
||||||
|
- `cargo fmt --all` - Format all Rust code
|
||||||
|
- `cargo clippy --all --fix --allow-dirty` - Rust linting with auto-fix
|
||||||
|
|
||||||
|
## 3. Code Style Guidelines
|
||||||
|
|
||||||
|
### General Principles
|
||||||
|
- Adhere to existing project conventions
|
||||||
|
- Mimic surrounding code style and patterns
|
||||||
|
- Add comments sparingly, focusing on _why_ rather than _what_
|
||||||
|
- No trailing whitespace
|
||||||
|
|
||||||
|
### Rust (CLI, Core, TUI)
|
||||||
|
|
||||||
|
**Naming:**
|
||||||
|
- `snake_case` - functions, variables, modules
|
||||||
|
- `PascalCase` - types, enums, traits
|
||||||
|
- `SCREAMING_SNAKE_CASE` - constants
|
||||||
|
|
||||||
|
**Imports (order matters):**
|
||||||
|
1. `std` imports first
|
||||||
|
2. External crates second
|
||||||
|
3. Internal modules third
|
||||||
|
4. Within each group, sort alphabetically
|
||||||
|
|
||||||
|
```rust
|
||||||
|
use std::{fmt::Debug, path::PathBuf};
|
||||||
|
use anyhow::Context;
|
||||||
|
use crate::params::Param;
|
||||||
|
```
|
||||||
|
|
||||||
|
**Error Handling:**
|
||||||
|
- Use `anyhow::Result<()>` for application-level code
|
||||||
|
- Use `thiserror` for library code when needed
|
||||||
|
- Propagate errors with `?` operator
|
||||||
|
- Add context with `.context()` for better messages
|
||||||
|
- Avoid `unwrap()` and `expect()` in production code
|
||||||
|
- Use `anyhow::bail!()` for early error returns
|
||||||
|
|
||||||
|
**Testing:**
|
||||||
|
- Unit tests in same file: `#[cfg(test)] mod tests { ... }`
|
||||||
|
- Use `#[test]` attribute for test functions
|
||||||
|
|
||||||
|
### C (Kernel Module)
|
||||||
|
|
||||||
|
**Naming:**
|
||||||
|
- `snake_case` - functions and variables
|
||||||
|
- `PascalCase` - types and structs
|
||||||
|
|
||||||
|
**Style:**
|
||||||
|
- Follow Linux kernel coding style
|
||||||
|
- Tabs for indentation
|
||||||
|
- Braces on same line (K&R style)
|
||||||
|
- Prefix internal/static functions with `_`
|
||||||
|
|
||||||
|
**Error Handling:**
|
||||||
|
- Return integer error codes (0 = success, negative = error)
|
||||||
|
- Use `goto` for cleanup on error (common kernel pattern)
|
||||||
|
|
||||||
|
**Testing:**
|
||||||
|
- Test files: `driver/tests/*.test.c`
|
||||||
|
- Use `assert_snapshot()` for snapshot testing
|
||||||
|
|
||||||
|
### TypeScript/Astro (Site)
|
||||||
|
|
||||||
|
- Use TypeScript strict mode
|
||||||
|
- Use Tailwind CSS utility-first approach
|
||||||
|
- `kebab-case` for component filenames
|
||||||
|
- `camelCase` for variables and functions
|
||||||
|
|
||||||
|
## 4. Naming Conventions Summary
|
||||||
|
|
||||||
|
| Language | Functions/Variables | Types/Enums | Files | Constants |
|
||||||
|
|----------|---------------------|-------------|-------|-----------|
|
||||||
|
| Rust | snake_case | PascalCase | snake_case.rs | SCREAMING_SNAKE_CASE |
|
||||||
|
| C | snake_case | PascalCase | snake_case.c | SCREAMING_SNAKE_CASE |
|
||||||
|
| TypeScript | camelCase | PascalCase | kebab-case.ts | SCREAMING_SNAKE_CASE |
|
||||||
|
|
||||||
|
## 5. Version Bumping
|
||||||
|
|
||||||
|
- **CLI changes:** Bump `cli/Cargo.toml` version AND create git tag
|
||||||
|
- **Driver changes:** Update `PKGBUILD` pkgver
|
||||||
|
|
||||||
|
**CLI version bump:**
|
||||||
|
1. Update `cli/Cargo.toml` version
|
||||||
|
2. `cargo update -p maccel-cli` - Update lock file
|
||||||
|
3. `git add -A && git commit -m "Bump CLI version to x.y.z"`
|
||||||
|
4. `git tag v<x.y.z> && git push origin v<x.y.z>`
|
||||||
|
|
||||||
|
## 6. Commit Messages
|
||||||
|
|
||||||
|
- Short subject line (<50 chars), imperative mood
|
||||||
|
- Capitalize first letter
|
||||||
|
- Blank line between subject and body
|
||||||
|
- No period at subject line end
|
||||||
|
|
||||||
|
Example:
|
||||||
|
```
|
||||||
|
Add new acceleration curve algorithm
|
||||||
|
|
||||||
|
Implements a cubic bezier curve for smoother acceleration
|
||||||
|
at high DPI values.
|
||||||
|
```
|
||||||
|
|
||||||
|
## 7. Key Files Reference
|
||||||
|
|
||||||
|
| Purpose | File |
|
||||||
|
|---------|------|
|
||||||
|
| CLI entry point | `cli/src/main.rs` |
|
||||||
|
| Core library exports | `crates/core/src/lib.rs` |
|
||||||
|
| Parameter definitions | `crates/core/src/params.rs` |
|
||||||
|
| Driver entry point | `driver/maccel.c` |
|
||||||
|
| Test utilities | `driver/tests/test_utils.h` |
|
||||||
|
|
||||||
|
## 8. Dependencies
|
||||||
|
|
||||||
|
- **Rust:** See `Cargo.toml` (workspace) and individual `Cargo.toml` files
|
||||||
|
- **C:** kernel headers, make, gcc
|
||||||
|
- **DKMS:** Required for driver installation
|
||||||
|
- **Site:** Node.js 24.x (`^24.0.0`), npm (see `site/package.json`)
|
||||||
@@ -0,0 +1,7 @@
|
|||||||
|
## Commit Messages
|
||||||
|
- Short subject line: Keep the first line (subject) brief and descriptive, aiming for under 50 characters.
|
||||||
|
- Imperative mood: Use verbs in the present tense, like "Add", "Fix", "Update".
|
||||||
|
- Capitalization: Capitalize the first letter of the subject line.
|
||||||
|
- Blank line separation: Use a blank line to separate the subject from the body explanation.
|
||||||
|
- Detailed body (optional): If needed, provide further context and reasoning in the body, wrapping lines at around 72 characters.
|
||||||
|
- No period at the end: Do not end the subject line with a period.
|
||||||
@@ -0,0 +1,339 @@
|
|||||||
|
GNU GENERAL PUBLIC LICENSE
|
||||||
|
Version 2, June 1991
|
||||||
|
|
||||||
|
Copyright (C) 1989, 1991 Free Software Foundation, Inc.,
|
||||||
|
51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA
|
||||||
|
Everyone is permitted to copy and distribute verbatim copies
|
||||||
|
of this license document, but changing it is not allowed.
|
||||||
|
|
||||||
|
Preamble
|
||||||
|
|
||||||
|
The licenses for most software are designed to take away your
|
||||||
|
freedom to share and change it. By contrast, the GNU General Public
|
||||||
|
License is intended to guarantee your freedom to share and change free
|
||||||
|
software--to make sure the software is free for all its users. This
|
||||||
|
General Public License applies to most of the Free Software
|
||||||
|
Foundation's software and to any other program whose authors commit to
|
||||||
|
using it. (Some other Free Software Foundation software is covered by
|
||||||
|
the GNU Lesser General Public License instead.) You can apply it to
|
||||||
|
your programs, too.
|
||||||
|
|
||||||
|
When we speak of free software, we are referring to freedom, not
|
||||||
|
price. Our General Public Licenses are designed to make sure that you
|
||||||
|
have the freedom to distribute copies of free software (and charge for
|
||||||
|
this service if you wish), that you receive source code or can get it
|
||||||
|
if you want it, that you can change the software or use pieces of it
|
||||||
|
in new free programs; and that you know you can do these things.
|
||||||
|
|
||||||
|
To protect your rights, we need to make restrictions that forbid
|
||||||
|
anyone to deny you these rights or to ask you to surrender the rights.
|
||||||
|
These restrictions translate to certain responsibilities for you if you
|
||||||
|
distribute copies of the software, or if you modify it.
|
||||||
|
|
||||||
|
For example, if you distribute copies of such a program, whether
|
||||||
|
gratis or for a fee, you must give the recipients all the rights that
|
||||||
|
you have. You must make sure that they, too, receive or can get the
|
||||||
|
source code. And you must show them these terms so they know their
|
||||||
|
rights.
|
||||||
|
|
||||||
|
We protect your rights with two steps: (1) copyright the software, and
|
||||||
|
(2) offer you this license which gives you legal permission to copy,
|
||||||
|
distribute and/or modify the software.
|
||||||
|
|
||||||
|
Also, for each author's protection and ours, we want to make certain
|
||||||
|
that everyone understands that there is no warranty for this free
|
||||||
|
software. If the software is modified by someone else and passed on, we
|
||||||
|
want its recipients to know that what they have is not the original, so
|
||||||
|
that any problems introduced by others will not reflect on the original
|
||||||
|
authors' reputations.
|
||||||
|
|
||||||
|
Finally, any free program is threatened constantly by software
|
||||||
|
patents. We wish to avoid the danger that redistributors of a free
|
||||||
|
program will individually obtain patent licenses, in effect making the
|
||||||
|
program proprietary. To prevent this, we have made it clear that any
|
||||||
|
patent must be licensed for everyone's free use or not licensed at all.
|
||||||
|
|
||||||
|
The precise terms and conditions for copying, distribution and
|
||||||
|
modification follow.
|
||||||
|
|
||||||
|
GNU GENERAL PUBLIC LICENSE
|
||||||
|
TERMS AND CONDITIONS FOR COPYING, DISTRIBUTION AND MODIFICATION
|
||||||
|
|
||||||
|
0. This License applies to any program or other work which contains
|
||||||
|
a notice placed by the copyright holder saying it may be distributed
|
||||||
|
under the terms of this General Public License. The "Program", below,
|
||||||
|
refers to any such program or work, and a "work based on the Program"
|
||||||
|
means either the Program or any derivative work under copyright law:
|
||||||
|
that is to say, a work containing the Program or a portion of it,
|
||||||
|
either verbatim or with modifications and/or translated into another
|
||||||
|
language. (Hereinafter, translation is included without limitation in
|
||||||
|
the term "modification".) Each licensee is addressed as "you".
|
||||||
|
|
||||||
|
Activities other than copying, distribution and modification are not
|
||||||
|
covered by this License; they are outside its scope. The act of
|
||||||
|
running the Program is not restricted, and the output from the Program
|
||||||
|
is covered only if its contents constitute a work based on the
|
||||||
|
Program (independent of having been made by running the Program).
|
||||||
|
Whether that is true depends on what the Program does.
|
||||||
|
|
||||||
|
1. You may copy and distribute verbatim copies of the Program's
|
||||||
|
source code as you receive it, in any medium, provided that you
|
||||||
|
conspicuously and appropriately publish on each copy an appropriate
|
||||||
|
copyright notice and disclaimer of warranty; keep intact all the
|
||||||
|
notices that refer to this License and to the absence of any warranty;
|
||||||
|
and give any other recipients of the Program a copy of this License
|
||||||
|
along with the Program.
|
||||||
|
|
||||||
|
You may charge a fee for the physical act of transferring a copy, and
|
||||||
|
you may at your option offer warranty protection in exchange for a fee.
|
||||||
|
|
||||||
|
2. You may modify your copy or copies of the Program or any portion
|
||||||
|
of it, thus forming a work based on the Program, and copy and
|
||||||
|
distribute such modifications or work under the terms of Section 1
|
||||||
|
above, provided that you also meet all of these conditions:
|
||||||
|
|
||||||
|
a) You must cause the modified files to carry prominent notices
|
||||||
|
stating that you changed the files and the date of any change.
|
||||||
|
|
||||||
|
b) You must cause any work that you distribute or publish, that in
|
||||||
|
whole or in part contains or is derived from the Program or any
|
||||||
|
part thereof, to be licensed as a whole at no charge to all third
|
||||||
|
parties under the terms of this License.
|
||||||
|
|
||||||
|
c) If the modified program normally reads commands interactively
|
||||||
|
when run, you must cause it, when started running for such
|
||||||
|
interactive use in the most ordinary way, to print or display an
|
||||||
|
announcement including an appropriate copyright notice and a
|
||||||
|
notice that there is no warranty (or else, saying that you provide
|
||||||
|
a warranty) and that users may redistribute the program under
|
||||||
|
these conditions, and telling the user how to view a copy of this
|
||||||
|
License. (Exception: if the Program itself is interactive but
|
||||||
|
does not normally print such an announcement, your work based on
|
||||||
|
the Program is not required to print an announcement.)
|
||||||
|
|
||||||
|
These requirements apply to the modified work as a whole. If
|
||||||
|
identifiable sections of that work are not derived from the Program,
|
||||||
|
and can be reasonably considered independent and separate works in
|
||||||
|
themselves, then this License, and its terms, do not apply to those
|
||||||
|
sections when you distribute them as separate works. But when you
|
||||||
|
distribute the same sections as part of a whole which is a work based
|
||||||
|
on the Program, the distribution of the whole must be on the terms of
|
||||||
|
this License, whose permissions for other licensees extend to the
|
||||||
|
entire whole, and thus to each and every part regardless of who wrote it.
|
||||||
|
|
||||||
|
Thus, it is not the intent of this section to claim rights or contest
|
||||||
|
your rights to work written entirely by you; rather, the intent is to
|
||||||
|
exercise the right to control the distribution of derivative or
|
||||||
|
collective works based on the Program.
|
||||||
|
|
||||||
|
In addition, mere aggregation of another work not based on the Program
|
||||||
|
with the Program (or with a work based on the Program) on a volume of
|
||||||
|
a storage or distribution medium does not bring the other work under
|
||||||
|
the scope of this License.
|
||||||
|
|
||||||
|
3. You may copy and distribute the Program (or a work based on it,
|
||||||
|
under Section 2) in object code or executable form under the terms of
|
||||||
|
Sections 1 and 2 above provided that you also do one of the following:
|
||||||
|
|
||||||
|
a) Accompany it with the complete corresponding machine-readable
|
||||||
|
source code, which must be distributed under the terms of Sections
|
||||||
|
1 and 2 above on a medium customarily used for software interchange; or,
|
||||||
|
|
||||||
|
b) Accompany it with a written offer, valid for at least three
|
||||||
|
years, to give any third party, for a charge no more than your
|
||||||
|
cost of physically performing source distribution, a complete
|
||||||
|
machine-readable copy of the corresponding source code, to be
|
||||||
|
distributed under the terms of Sections 1 and 2 above on a medium
|
||||||
|
customarily used for software interchange; or,
|
||||||
|
|
||||||
|
c) Accompany it with the information you received as to the offer
|
||||||
|
to distribute corresponding source code. (This alternative is
|
||||||
|
allowed only for noncommercial distribution and only if you
|
||||||
|
received the program in object code or executable form with such
|
||||||
|
an offer, in accord with Subsection b above.)
|
||||||
|
|
||||||
|
The source code for a work means the preferred form of the work for
|
||||||
|
making modifications to it. For an executable work, complete source
|
||||||
|
code means all the source code for all modules it contains, plus any
|
||||||
|
associated interface definition files, plus the scripts used to
|
||||||
|
control compilation and installation of the executable. However, as a
|
||||||
|
special exception, the source code distributed need not include
|
||||||
|
anything that is normally distributed (in either source or binary
|
||||||
|
form) with the major components (compiler, kernel, and so on) of the
|
||||||
|
operating system on which the executable runs, unless that component
|
||||||
|
itself accompanies the executable.
|
||||||
|
|
||||||
|
If distribution of executable or object code is made by offering
|
||||||
|
access to copy from a designated place, then offering equivalent
|
||||||
|
access to copy the source code from the same place counts as
|
||||||
|
distribution of the source code, even though third parties are not
|
||||||
|
compelled to copy the source along with the object code.
|
||||||
|
|
||||||
|
4. You may not copy, modify, sublicense, or distribute the Program
|
||||||
|
except as expressly provided under this License. Any attempt
|
||||||
|
otherwise to copy, modify, sublicense or distribute the Program is
|
||||||
|
void, and will automatically terminate your rights under this License.
|
||||||
|
However, parties who have received copies, or rights, from you under
|
||||||
|
this License will not have their licenses terminated so long as such
|
||||||
|
parties remain in full compliance.
|
||||||
|
|
||||||
|
5. You are not required to accept this License, since you have not
|
||||||
|
signed it. However, nothing else grants you permission to modify or
|
||||||
|
distribute the Program or its derivative works. These actions are
|
||||||
|
prohibited by law if you do not accept this License. Therefore, by
|
||||||
|
modifying or distributing the Program (or any work based on the
|
||||||
|
Program), you indicate your acceptance of this License to do so, and
|
||||||
|
all its terms and conditions for copying, distributing or modifying
|
||||||
|
the Program or works based on it.
|
||||||
|
|
||||||
|
6. Each time you redistribute the Program (or any work based on the
|
||||||
|
Program), the recipient automatically receives a license from the
|
||||||
|
original licensor to copy, distribute or modify the Program subject to
|
||||||
|
these terms and conditions. You may not impose any further
|
||||||
|
restrictions on the recipients' exercise of the rights granted herein.
|
||||||
|
You are not responsible for enforcing compliance by third parties to
|
||||||
|
this License.
|
||||||
|
|
||||||
|
7. If, as a consequence of a court judgment or allegation of patent
|
||||||
|
infringement or for any other reason (not limited to patent issues),
|
||||||
|
conditions are imposed on you (whether by court order, agreement or
|
||||||
|
otherwise) that contradict the conditions of this License, they do not
|
||||||
|
excuse you from the conditions of this License. If you cannot
|
||||||
|
distribute so as to satisfy simultaneously your obligations under this
|
||||||
|
License and any other pertinent obligations, then as a consequence you
|
||||||
|
may not distribute the Program at all. For example, if a patent
|
||||||
|
license would not permit royalty-free redistribution of the Program by
|
||||||
|
all those who receive copies directly or indirectly through you, then
|
||||||
|
the only way you could satisfy both it and this License would be to
|
||||||
|
refrain entirely from distribution of the Program.
|
||||||
|
|
||||||
|
If any portion of this section is held invalid or unenforceable under
|
||||||
|
any particular circumstance, the balance of the section is intended to
|
||||||
|
apply and the section as a whole is intended to apply in other
|
||||||
|
circumstances.
|
||||||
|
|
||||||
|
It is not the purpose of this section to induce you to infringe any
|
||||||
|
patents or other property right claims or to contest validity of any
|
||||||
|
such claims; this section has the sole purpose of protecting the
|
||||||
|
integrity of the free software distribution system, which is
|
||||||
|
implemented by public license practices. Many people have made
|
||||||
|
generous contributions to the wide range of software distributed
|
||||||
|
through that system in reliance on consistent application of that
|
||||||
|
system; it is up to the author/donor to decide if he or she is willing
|
||||||
|
to distribute software through any other system and a licensee cannot
|
||||||
|
impose that choice.
|
||||||
|
|
||||||
|
This section is intended to make thoroughly clear what is believed to
|
||||||
|
be a consequence of the rest of this License.
|
||||||
|
|
||||||
|
8. If the distribution and/or use of the Program is restricted in
|
||||||
|
certain countries either by patents or by copyrighted interfaces, the
|
||||||
|
original copyright holder who places the Program under this License
|
||||||
|
may add an explicit geographical distribution limitation excluding
|
||||||
|
those countries, so that distribution is permitted only in or among
|
||||||
|
countries not thus excluded. In such case, this License incorporates
|
||||||
|
the limitation as if written in the body of this License.
|
||||||
|
|
||||||
|
9. The Free Software Foundation may publish revised and/or new versions
|
||||||
|
of the General Public License from time to time. Such new versions will
|
||||||
|
be similar in spirit to the present version, but may differ in detail to
|
||||||
|
address new problems or concerns.
|
||||||
|
|
||||||
|
Each version is given a distinguishing version number. If the Program
|
||||||
|
specifies a version number of this License which applies to it and "any
|
||||||
|
later version", you have the option of following the terms and conditions
|
||||||
|
either of that version or of any later version published by the Free
|
||||||
|
Software Foundation. If the Program does not specify a version number of
|
||||||
|
this License, you may choose any version ever published by the Free Software
|
||||||
|
Foundation.
|
||||||
|
|
||||||
|
10. If you wish to incorporate parts of the Program into other free
|
||||||
|
programs whose distribution conditions are different, write to the author
|
||||||
|
to ask for permission. For software which is copyrighted by the Free
|
||||||
|
Software Foundation, write to the Free Software Foundation; we sometimes
|
||||||
|
make exceptions for this. Our decision will be guided by the two goals
|
||||||
|
of preserving the free status of all derivatives of our free software and
|
||||||
|
of promoting the sharing and reuse of software generally.
|
||||||
|
|
||||||
|
NO WARRANTY
|
||||||
|
|
||||||
|
11. BECAUSE THE PROGRAM IS LICENSED FREE OF CHARGE, THERE IS NO WARRANTY
|
||||||
|
FOR THE PROGRAM, TO THE EXTENT PERMITTED BY APPLICABLE LAW. EXCEPT WHEN
|
||||||
|
OTHERWISE STATED IN WRITING THE COPYRIGHT HOLDERS AND/OR OTHER PARTIES
|
||||||
|
PROVIDE THE PROGRAM "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED
|
||||||
|
OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
|
||||||
|
MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE RISK AS
|
||||||
|
TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD THE
|
||||||
|
PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY SERVICING,
|
||||||
|
REPAIR OR CORRECTION.
|
||||||
|
|
||||||
|
12. IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING
|
||||||
|
WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MAY MODIFY AND/OR
|
||||||
|
REDISTRIBUTE THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES,
|
||||||
|
INCLUDING ANY GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING
|
||||||
|
OUT OF THE USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED
|
||||||
|
TO LOSS OF DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY
|
||||||
|
YOU OR THIRD PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER
|
||||||
|
PROGRAMS), EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE
|
||||||
|
POSSIBILITY OF SUCH DAMAGES.
|
||||||
|
|
||||||
|
END OF TERMS AND CONDITIONS
|
||||||
|
|
||||||
|
How to Apply These Terms to Your New Programs
|
||||||
|
|
||||||
|
If you develop a new program, and you want it to be of the greatest
|
||||||
|
possible use to the public, the best way to achieve this is to make it
|
||||||
|
free software which everyone can redistribute and change under these terms.
|
||||||
|
|
||||||
|
To do so, attach the following notices to the program. It is safest
|
||||||
|
to attach them to the start of each source file to most effectively
|
||||||
|
convey the exclusion of warranty; and each file should have at least
|
||||||
|
the "copyright" line and a pointer to where the full notice is found.
|
||||||
|
|
||||||
|
<one line to give the program's name and a brief idea of what it does.>
|
||||||
|
Copyright (C) <year> <name of author>
|
||||||
|
|
||||||
|
This program is free software; you can redistribute it and/or modify
|
||||||
|
it under the terms of the GNU General Public License as published by
|
||||||
|
the Free Software Foundation; either version 2 of the License, or
|
||||||
|
(at your option) any later version.
|
||||||
|
|
||||||
|
This program is distributed in the hope that it will be useful,
|
||||||
|
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||||
|
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||||
|
GNU General Public License for more details.
|
||||||
|
|
||||||
|
You should have received a copy of the GNU General Public License along
|
||||||
|
with this program; if not, write to the Free Software Foundation, Inc.,
|
||||||
|
51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
|
||||||
|
|
||||||
|
Also add information on how to contact you by electronic and paper mail.
|
||||||
|
|
||||||
|
If the program is interactive, make it output a short notice like this
|
||||||
|
when it starts in an interactive mode:
|
||||||
|
|
||||||
|
Gnomovision version 69, Copyright (C) year name of author
|
||||||
|
Gnomovision comes with ABSOLUTELY NO WARRANTY; for details type `show w'.
|
||||||
|
This is free software, and you are welcome to redistribute it
|
||||||
|
under certain conditions; type `show c' for details.
|
||||||
|
|
||||||
|
The hypothetical commands `show w' and `show c' should show the appropriate
|
||||||
|
parts of the General Public License. Of course, the commands you use may
|
||||||
|
be called something other than `show w' and `show c'; they could even be
|
||||||
|
mouse-clicks or menu items--whatever suits your program.
|
||||||
|
|
||||||
|
You should also get your employer (if you work as a programmer) or your
|
||||||
|
school, if any, to sign a "copyright disclaimer" for the program, if
|
||||||
|
necessary. Here is a sample; alter the names:
|
||||||
|
|
||||||
|
Yoyodyne, Inc., hereby disclaims all copyright interest in the program
|
||||||
|
`Gnomovision' (which makes passes at compilers) written by James Hacker.
|
||||||
|
|
||||||
|
<signature of Ty Coon>, 1 April 1989
|
||||||
|
Ty Coon, President of Vice
|
||||||
|
|
||||||
|
This General Public License does not permit incorporating your program into
|
||||||
|
proprietary programs. If your program is a subroutine library, you may
|
||||||
|
consider it more useful to permit linking proprietary applications with the
|
||||||
|
library. If this is what you want to do, use the GNU Lesser General
|
||||||
|
Public License instead of this License.
|
||||||
@@ -0,0 +1,67 @@
|
|||||||
|
DRIVERDIR?=`pwd`/driver
|
||||||
|
MODULEDIR?=/lib/modules/`uname -r`/kernel/drivers/usb
|
||||||
|
|
||||||
|
DRIVER_CFLAGS ?= -DFIXEDPT_BITS=$(shell getconf LONG_BIT)
|
||||||
|
|
||||||
|
build:
|
||||||
|
$(MAKE) DRIVER_CFLAGS="$(DRIVER_CFLAGS)" -C $(DRIVERDIR)
|
||||||
|
|
||||||
|
build_debug: override DRIVER_CFLAGS += -g -DDEBUG
|
||||||
|
build_debug: build
|
||||||
|
|
||||||
|
test:
|
||||||
|
$(MAKE) -C $(DRIVERDIR) test
|
||||||
|
test_debug:
|
||||||
|
$(MAKE) -C $(DRIVERDIR) test_debug
|
||||||
|
|
||||||
|
install_debug: build_debug install
|
||||||
|
|
||||||
|
install: build
|
||||||
|
@sudo insmod $(DRIVERDIR)/maccel.ko;
|
||||||
|
|
||||||
|
@mkdir -p $(MODULEDIR)
|
||||||
|
@sudo cp -v $(DRIVERDIR)/*.ko $(MODULEDIR);
|
||||||
|
@sudo chown -v root:root $(MODULEDIR)/*.ko;
|
||||||
|
sudo groupadd -f maccel;
|
||||||
|
sudo depmod;
|
||||||
|
sudo chown -v :maccel /sys/module/maccel/parameters/* /dev/maccel;
|
||||||
|
sudo chmod g+r /dev/maccel;
|
||||||
|
ls -l /sys/module/maccel/parameters/*
|
||||||
|
|
||||||
|
uninstall: clean
|
||||||
|
@sudo rm -fv $(MODULEDIR)/maccel.ko
|
||||||
|
@sudo rmmod maccel
|
||||||
|
|
||||||
|
reinstall: uninstall
|
||||||
|
@sudo make DRIVER_CFLAGS=$(DRIVER_CFLAGS) install
|
||||||
|
|
||||||
|
reinstall_debug: uninstall
|
||||||
|
@sudo make DRIVER_CFLAGS=$(DRIVER_CFLAGS) install_debug
|
||||||
|
|
||||||
|
dev_cli:
|
||||||
|
cargo watch -x 'run'
|
||||||
|
|
||||||
|
build_cli:
|
||||||
|
cargo build --bin maccel --release
|
||||||
|
|
||||||
|
install_cli: build_cli
|
||||||
|
sudo install -m 755 target/release/maccel /usr/local/bin/maccel
|
||||||
|
|
||||||
|
uninstall_cli:
|
||||||
|
@sudo rm -f /usr/local/bin/maccel
|
||||||
|
|
||||||
|
udev_install:
|
||||||
|
sudo install -m 644 -v -D `pwd`/udev_rules/99-maccel.rules /usr/lib/udev/rules.d/99-maccel.rules
|
||||||
|
sudo install -m 755 -v -D `pwd`/udev_rules/maccel_param_ownership_and_resets /usr/lib/udev/maccel_param_ownership_and_resets
|
||||||
|
|
||||||
|
udev_uninstall:
|
||||||
|
@sudo rm -f /usr/lib/udev/rules.d/99-maccel*.rules /usr/lib/udev/maccel_*
|
||||||
|
sudo udevadm control --reload-rules
|
||||||
|
|
||||||
|
udev_trigger: udev_install
|
||||||
|
udevadm control --reload-rules
|
||||||
|
udevadm trigger --subsystem-match=usb --subsystem-match=input --subsystem-match=hid --attr-match=bInterfaceClass=03 --attr-match=bInterfaceSubClass=01 --attr-match=bInterfaceProtocol=02
|
||||||
|
|
||||||
|
clean:
|
||||||
|
@rm -rf src pkg maccel maccel*.zst maccel-dkms*.log*
|
||||||
|
$(MAKE) -C $(DRIVERDIR) clean
|
||||||
@@ -0,0 +1,63 @@
|
|||||||
|
pkgname=maccel-dkms
|
||||||
|
_pkgname="maccel"
|
||||||
|
pkgver=0.5.9
|
||||||
|
pkgrel=1
|
||||||
|
pkgdesc="Mouse acceleration driver and kernel module for Linux."
|
||||||
|
arch=("x86_64")
|
||||||
|
url="https://www.maccel.org/"
|
||||||
|
license=("GPL-2.0-or-later")
|
||||||
|
|
||||||
|
install=maccel.install
|
||||||
|
depends=("dkms")
|
||||||
|
makedepends=("git" "cargo")
|
||||||
|
|
||||||
|
# DEBUG_CFLAGS="$DEBUG_CFLAGS -DDEBUG"
|
||||||
|
options=(!debug !lto)
|
||||||
|
|
||||||
|
source=("git+https://github.com/Gnarus-G/maccel.git")
|
||||||
|
sha256sums=("SKIP")
|
||||||
|
|
||||||
|
prepare() {
|
||||||
|
export RUSTUP_TOOLCHAIN=stable
|
||||||
|
|
||||||
|
platform="$(rustc -vV | sed -n 's/host: //p')"
|
||||||
|
|
||||||
|
cargo fetch --locked --target "${platform}" --manifest-path="${srcdir}/maccel/Cargo.toml"
|
||||||
|
}
|
||||||
|
|
||||||
|
build() {
|
||||||
|
export RUSTUP_TOOLCHAIN=stable
|
||||||
|
export CARGO_TARGET_DIR=target
|
||||||
|
|
||||||
|
# Build the CLI
|
||||||
|
cargo build --bin maccel --release --frozen --manifest-path="${srcdir}/maccel/Cargo.toml"
|
||||||
|
}
|
||||||
|
|
||||||
|
package() {
|
||||||
|
# Add group
|
||||||
|
install -Dm 644 "${srcdir}/maccel/maccel.sysusers" "${pkgdir}/usr/lib/sysusers.d/${_pkgname}.conf"
|
||||||
|
|
||||||
|
# Install Driver
|
||||||
|
install -Dm 644 "${srcdir}/maccel/dkms.conf" "${pkgdir}/usr/src/${_pkgname}-${pkgver}/dkms.conf"
|
||||||
|
|
||||||
|
# Escape path separators from debug flags values
|
||||||
|
DRIVER_CFLAGS=$(echo ${DEBUG_CFLAGS} | sed -e "s/\//\\\\\\//g")
|
||||||
|
|
||||||
|
# Set name and version
|
||||||
|
sed -e "s/@_PKGNAME@/${_pkgname}/" \
|
||||||
|
-e "s/@PKGVER@/${pkgver}/" \
|
||||||
|
-e "s/@DRIVER_CFLAGS@/'${DRIVER_CFLAGS}'/" \
|
||||||
|
-i "${pkgdir}/usr/src/${_pkgname}-${pkgver}/dkms.conf"
|
||||||
|
|
||||||
|
cp -r "${srcdir}/maccel/driver/." "${pkgdir}/usr/src/${_pkgname}-${pkgver}/"
|
||||||
|
|
||||||
|
# Install CLI
|
||||||
|
install -Dm 755 "${srcdir}/target/release/maccel" "${pkgdir}/usr/bin/maccel"
|
||||||
|
|
||||||
|
# Install udev rules
|
||||||
|
install -Dm 644 "${srcdir}/maccel/udev_rules/99-maccel.rules" "${pkgdir}/usr/lib/udev/rules.d/99-maccel.rules"
|
||||||
|
install -Dm 755 "${srcdir}/maccel/udev_rules/maccel_param_ownership_and_resets" "${pkgdir}/usr/lib/udev/maccel_param_ownership_and_resets"
|
||||||
|
|
||||||
|
# Install License
|
||||||
|
install -Dm 644 "${srcdir}/maccel/LICENSE" "${pkgdir}/usr/share/licenses/${_pkgname}/LICENSE"
|
||||||
|
}
|
||||||
@@ -0,0 +1,181 @@
|
|||||||
|
# maccel NixOS Flake
|
||||||
|
|
||||||
|
If you're on NixOS, maccel provides a declarative flake module to seamlessly integrate and configure the mouse acceleration driver through your system configuration.
|
||||||
|
|
||||||
|
**Benefits of the NixOS module:**
|
||||||
|
|
||||||
|
- **Declarative configuration**: All parameters defined in your NixOS config
|
||||||
|
- **Direct kernel module parameters**: More efficient than reset scripts approach
|
||||||
|
- **No manual setup**: Kernel module, udev rules, and CLI tools installed automatically
|
||||||
|
- **Seamless updates**: Update maccel alongside your system like any other flake
|
||||||
|
- **Parameter discovery**: Optional CLI/TUI for real-time parameter tuning
|
||||||
|
|
||||||
|
## Quick Start
|
||||||
|
|
||||||
|
Add to your `flake.nix` inputs:
|
||||||
|
|
||||||
|
```nix
|
||||||
|
maccel.url = "github:Gnarus-G/maccel";
|
||||||
|
```
|
||||||
|
|
||||||
|
Create your `maccel.nix` module:
|
||||||
|
|
||||||
|
```nix
|
||||||
|
{inputs, ...}: {
|
||||||
|
imports = [
|
||||||
|
inputs.maccel.nixosModules.default
|
||||||
|
];
|
||||||
|
|
||||||
|
hardware.maccel = {
|
||||||
|
enable = true;
|
||||||
|
enableCli = true; # Optional
|
||||||
|
|
||||||
|
parameters = {
|
||||||
|
# Common (all modes)
|
||||||
|
sensMultiplier = 1.0;
|
||||||
|
yxRatio = 1.0;
|
||||||
|
inputDpi = 1000.0;
|
||||||
|
angleRotation = 0.0;
|
||||||
|
mode = "synchronous";
|
||||||
|
|
||||||
|
# Linear mode
|
||||||
|
acceleration = 0.3;
|
||||||
|
offset = 2.0;
|
||||||
|
outputCap = 2.0;
|
||||||
|
|
||||||
|
# Natural mode
|
||||||
|
decayRate = 0.1;
|
||||||
|
offset = 2.0;
|
||||||
|
limit = 1.5;
|
||||||
|
|
||||||
|
# Synchronous mode
|
||||||
|
gamma = 1.0;
|
||||||
|
smooth = 0.5;
|
||||||
|
motivity = 2.5;
|
||||||
|
syncSpeed = 10.0;
|
||||||
|
};
|
||||||
|
};
|
||||||
|
|
||||||
|
# To use maccel CLI/TUI without sudo
|
||||||
|
users.groups.maccel.members = ["your_username"];
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
## How it Works
|
||||||
|
|
||||||
|
### Parameter Management
|
||||||
|
|
||||||
|
- **NixOS config**: Parameters are set directly as kernel module parameters at boot for maximum efficiency
|
||||||
|
- **CLI/TUI**: When `enableCli = true`, you can use `maccel tui` or `maccel set` for real-time adjustments
|
||||||
|
- **Temporary changes**: CLI/TUI modifications are session-only and revert after reboot
|
||||||
|
|
||||||
|
### Recommended Workflow
|
||||||
|
|
||||||
|
1. **Enable CLI tools**: Set `enableCli = true` for parameter discovery
|
||||||
|
2. **Find optimal values**: Use `maccel tui` to experiment with parameters in real-time
|
||||||
|
3. **Apply permanently**: Copy your optimal values to `hardware.maccel.parameters` in your NixOS config
|
||||||
|
4. **Rebuild system**: Run `sudo nixos-rebuild switch --flake .` to make settings persistent
|
||||||
|
|
||||||
|
## Maintaining the NixOS Module
|
||||||
|
|
||||||
|
When new acceleration modes or parameters are added to maccel, the [NixOS module](module.nix) needs to be updated accordingly. This section provides a step-by-step guide for maintainers.
|
||||||
|
|
||||||
|
### 1. Adding New Modes
|
||||||
|
|
||||||
|
New modes are defined in [`driver/accel/mode.h`](driver/accel/mode.h). To add support:
|
||||||
|
|
||||||
|
**In [`module.nix`](module.nix):**
|
||||||
|
|
||||||
|
#### Step 1: Add to modeMap
|
||||||
|
|
||||||
|
```nix
|
||||||
|
# Update the modeMap with new modes
|
||||||
|
modeMap = {
|
||||||
|
linear = 0;
|
||||||
|
natural = 1;
|
||||||
|
synchronous = 2;
|
||||||
|
no_accel = 3;
|
||||||
|
new_mode = 4; # Add new mode here
|
||||||
|
};
|
||||||
|
```
|
||||||
|
|
||||||
|
#### Step 2: Add the mode option
|
||||||
|
|
||||||
|
```nix
|
||||||
|
# In options.hardware.maccel.parameters
|
||||||
|
mode = mkOption {
|
||||||
|
type = types.nullOr (types.enum ["linear" "natural" "synchronous" "no_accel" "new_mode"]);
|
||||||
|
default = null;
|
||||||
|
description = "Acceleration mode.";
|
||||||
|
};
|
||||||
|
```
|
||||||
|
|
||||||
|
### 2. Adding New Parameters
|
||||||
|
|
||||||
|
New parameters are defined in [`driver/params.h`](driver/params.h). To add support:
|
||||||
|
|
||||||
|
**In [`module.nix`](module.nix):**
|
||||||
|
|
||||||
|
#### Step 1: Add to parameterMap
|
||||||
|
|
||||||
|
```nix
|
||||||
|
# In parameterMap
|
||||||
|
parameterMap = {
|
||||||
|
# Existing parameters...
|
||||||
|
NEW_PARAM = cfg.parameters.newParam;
|
||||||
|
};
|
||||||
|
```
|
||||||
|
|
||||||
|
#### Step 2: Add NixOS option
|
||||||
|
|
||||||
|
```nix
|
||||||
|
# In options.hardware.maccel.parameters
|
||||||
|
newParam = mkOption {
|
||||||
|
type = types.nullOr types.float; # or appropriate type
|
||||||
|
default = null;
|
||||||
|
description = "Description of the new parameter.";
|
||||||
|
};
|
||||||
|
```
|
||||||
|
|
||||||
|
#### Step 3: Add validation (if needed)
|
||||||
|
|
||||||
|
```nix
|
||||||
|
# For parameters with constraints
|
||||||
|
newParam = mkOption {
|
||||||
|
type = types.nullOr (types.addCheck types.float (x: x > 0.0)
|
||||||
|
// {description = "positive float";});
|
||||||
|
default = null;
|
||||||
|
description = "Description of the new parameter. Must be positive.";
|
||||||
|
};
|
||||||
|
```
|
||||||
|
|
||||||
|
### 3. Using LLMs
|
||||||
|
|
||||||
|
This NixOS module was developed with significant LLM assistance. Here's a comprehensive prompt for maintaining it:
|
||||||
|
|
||||||
|
```
|
||||||
|
I need to update the NixOS module for maccel. Please analyze the maccel codebase and help me maintain the NixOS module:
|
||||||
|
|
||||||
|
CONTEXT:
|
||||||
|
- maccel is a Linux mouse acceleration driver with kernel module and CLI tools
|
||||||
|
- The NixOS module is in module.nix and provides declarative configuration
|
||||||
|
- Parameters are defined in driver/params.h and modes in driver/accel/mode.h
|
||||||
|
- Read README_NIXOS.md section "Maintaining the NixOS Module" for detailed patterns and examples
|
||||||
|
|
||||||
|
TASKS:
|
||||||
|
1. **Discover changes**: Analyze driver/params.h and driver/accel/ for new parameters, modes, or modifications
|
||||||
|
2. **Compare with current**: Check what's missing from existing modeMap and parameterMap in module.nix
|
||||||
|
3. **Add new modes**: Update modeMap with correct enum values and add to mode option enum
|
||||||
|
4. **Add new parameters**: Add to parameterMap and create NixOS options with proper type validation, descriptions, and constraints
|
||||||
|
5. **Explain changes**: Summarize what was added and why
|
||||||
|
|
||||||
|
Follow the exact patterns shown in README_NIXOS.md and existing patterns in module.nix. Provide complete code snippets for module.nix.
|
||||||
|
```
|
||||||
|
|
||||||
|
### 4. Testing The Module
|
||||||
|
|
||||||
|
After modifying [`module.nix`](module.nix):
|
||||||
|
|
||||||
|
1. **Format nix code**: `alejandra .`
|
||||||
|
2. **Check nix syntax**: `nix flake check`
|
||||||
|
3. **Test parameter loading**: Confirm parameters load correctly on boot when set via NixOS config
|
||||||
@@ -0,0 +1,3 @@
|
|||||||
|
*.o
|
||||||
|
bin
|
||||||
|
venv
|
||||||
@@ -0,0 +1,13 @@
|
|||||||
|
bench_driver: build
|
||||||
|
@bin/evdriverlag
|
||||||
|
|
||||||
|
bench_handler: build
|
||||||
|
@bin/evinputlag
|
||||||
|
|
||||||
|
build: evdriverlag.c evinputlag.c
|
||||||
|
@mkdir -p bin
|
||||||
|
@cc evdriverlag.c -o bin/evdriverlag
|
||||||
|
@cc evinputlag.c -o bin/evinputlag
|
||||||
|
|
||||||
|
clean:
|
||||||
|
rm *.o
|
||||||
@@ -0,0 +1,54 @@
|
|||||||
|
#include <fcntl.h>
|
||||||
|
#include <linux/input.h>
|
||||||
|
#include <stdio.h>
|
||||||
|
#include <sys/types.h>
|
||||||
|
#include <unistd.h>
|
||||||
|
|
||||||
|
#define MOUSE_DEVICE "/dev/input/event2"
|
||||||
|
|
||||||
|
static __suseconds_t to_us(struct timeval time) {
|
||||||
|
return time.tv_sec * 1000000L + time.tv_usec;
|
||||||
|
}
|
||||||
|
|
||||||
|
#define EVENT_TIME_PAIR_CNT 1000 * 2
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
// Open the source device
|
||||||
|
int fd_source = open(MOUSE_DEVICE, O_RDONLY);
|
||||||
|
if (fd_source < 0) {
|
||||||
|
perror("Failed to open source device");
|
||||||
|
return 1;
|
||||||
|
}
|
||||||
|
|
||||||
|
__suseconds_t times[EVENT_TIME_PAIR_CNT] = {0};
|
||||||
|
int tidx = 0;
|
||||||
|
|
||||||
|
// Main loop to read, modify, and write events
|
||||||
|
struct input_event ev;
|
||||||
|
while (tidx < EVENT_TIME_PAIR_CNT && read(fd_source, &ev, sizeof(ev)) > 0) {
|
||||||
|
struct timeval now;
|
||||||
|
gettimeofday(&now, NULL);
|
||||||
|
|
||||||
|
times[tidx++] = to_us(ev.time);
|
||||||
|
times[tidx++] = to_us(now);
|
||||||
|
}
|
||||||
|
|
||||||
|
// Cleanup
|
||||||
|
close(fd_source);
|
||||||
|
|
||||||
|
tidx = 0;
|
||||||
|
|
||||||
|
printf("event_time,read_time,diff\n"); // eve'ry is in us
|
||||||
|
while (tidx < EVENT_TIME_PAIR_CNT) {
|
||||||
|
__suseconds_t event_time = times[tidx++];
|
||||||
|
__suseconds_t read_time = times[tidx++];
|
||||||
|
/* __suseconds_t diff = ; */
|
||||||
|
|
||||||
|
/* printf("event time: %luus, read time: %luus\n", event_time, read_time);
|
||||||
|
*/
|
||||||
|
/* printf("time diff: %luus\n", read_time - event_time); */
|
||||||
|
printf("%lu,%lu,%lu\n", event_time, read_time, read_time - event_time);
|
||||||
|
}
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
@@ -0,0 +1,69 @@
|
|||||||
|
#include <fcntl.h>
|
||||||
|
#include <linux/input.h>
|
||||||
|
#include <stdio.h>
|
||||||
|
#include <sys/types.h>
|
||||||
|
#include <unistd.h>
|
||||||
|
|
||||||
|
#define MOUSE_DEVICE "/dev/input/event7"
|
||||||
|
|
||||||
|
static __suseconds_t to_us(struct timeval time) {
|
||||||
|
return time.tv_sec * 1000000L + time.tv_usec;
|
||||||
|
}
|
||||||
|
|
||||||
|
#define EVENT_TIME_PAIR_CNT 1000 * 3
|
||||||
|
|
||||||
|
/**
|
||||||
|
* NOTE: This benchmark depends on temporarily setting
|
||||||
|
* maccel_filter from input_handler.h to inject ktime_t diff (in us)
|
||||||
|
* between when the original event was received and the modified event was
|
||||||
|
* reported, as the value of the REL_Z REL_ABS event. So we can measure the
|
||||||
|
* extra lag from the input_handler. Assuming REL_Z, REL_ABS are only produced
|
||||||
|
* as carriers of the extra lag measurement.
|
||||||
|
*
|
||||||
|
*/
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
int fd_source = open(MOUSE_DEVICE, O_RDONLY);
|
||||||
|
if (fd_source < 0) {
|
||||||
|
perror("Failed to open device");
|
||||||
|
return 1;
|
||||||
|
}
|
||||||
|
|
||||||
|
__suseconds_t times[EVENT_TIME_PAIR_CNT] = {0};
|
||||||
|
int tidx = 0;
|
||||||
|
|
||||||
|
// Main loop to read, modify, and write events
|
||||||
|
struct input_event ev;
|
||||||
|
while (tidx < EVENT_TIME_PAIR_CNT && read(fd_source, &ev, sizeof(ev)) > 0) {
|
||||||
|
struct timeval now;
|
||||||
|
gettimeofday(&now, NULL);
|
||||||
|
|
||||||
|
if (ev.type == EV_REL && (ev.code == 2 || ev.code == 3)) {
|
||||||
|
/* fprintf(stderr, "EVENT: type %d, code %d, value %d\n", ev.type,
|
||||||
|
* ev.code, */
|
||||||
|
/* ev.value); */
|
||||||
|
times[tidx++] = to_us(ev.time);
|
||||||
|
times[tidx++] = to_us(now);
|
||||||
|
times[tidx++] = ev.value;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
// Cleanup
|
||||||
|
close(fd_source);
|
||||||
|
|
||||||
|
tidx = 0;
|
||||||
|
|
||||||
|
printf("event_time,read_time,naive_diff,extra_lag,diff\n"); // eve'ry is in us
|
||||||
|
while (tidx < EVENT_TIME_PAIR_CNT) {
|
||||||
|
__suseconds_t event_time = times[tidx++];
|
||||||
|
__suseconds_t read_time = times[tidx++];
|
||||||
|
__suseconds_t extra_lag_measured_by_input_handler = times[tidx++];
|
||||||
|
|
||||||
|
__suseconds_t diff = read_time - event_time;
|
||||||
|
printf("%lu,%lu,%lu,%lu,%lu\n", event_time, read_time, diff,
|
||||||
|
extra_lag_measured_by_input_handler,
|
||||||
|
diff + extra_lag_measured_by_input_handler);
|
||||||
|
}
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
@@ -0,0 +1,32 @@
|
|||||||
|
import matplotlib.pyplot as plt
|
||||||
|
import numpy as np
|
||||||
|
import pandas as pd
|
||||||
|
|
||||||
|
control_data = pd.read_csv("control.csv")
|
||||||
|
new_data = pd.read_csv("input_handler.csv")
|
||||||
|
|
||||||
|
fig, ax = plt.subplots()
|
||||||
|
|
||||||
|
ax.plot(np.arange(1000), control_data["diff"], 'b',
|
||||||
|
label=f"Hid-generic (mean = {control_data["diff"].mean()}us)")
|
||||||
|
|
||||||
|
ax.plot(np.arange(1000), new_data["diff"], 'g',
|
||||||
|
label=f"New driver (mean = {new_data["diff"].mean()}us)")
|
||||||
|
|
||||||
|
plt.ylabel('lag (us)')
|
||||||
|
plt.xlabel('reads')
|
||||||
|
|
||||||
|
legend = ax.legend(loc='upper center', fontsize='x-large')
|
||||||
|
|
||||||
|
plt.show()
|
||||||
|
|
||||||
|
""" Some extra data points out of curiosity """
|
||||||
|
|
||||||
|
virtual_minus_source = new_data["virtual_event_time"] - new_data["event_time"]
|
||||||
|
print("average lag between source and virtual device:",
|
||||||
|
virtual_minus_source.mean())
|
||||||
|
|
||||||
|
new_data["read_minus_virtual"] = new_data["read_time"] - \
|
||||||
|
new_data["virtual_event_time"]
|
||||||
|
print("average lag between virtual device and read:",
|
||||||
|
new_data["read_minus_virtual"].mean())
|
||||||
@@ -0,0 +1,11 @@
|
|||||||
|
contourpy==1.2.1
|
||||||
|
cycler==0.12.1
|
||||||
|
fonttools==4.53.1
|
||||||
|
kiwisolver==1.4.5
|
||||||
|
matplotlib==3.9.1.post1
|
||||||
|
numpy==2.0.1
|
||||||
|
packaging==24.1
|
||||||
|
pillow==10.4.0
|
||||||
|
pyparsing==3.1.2
|
||||||
|
python-dateutil==2.9.0.post0
|
||||||
|
six==1.16.0
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
/target
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
/target
|
||||||
@@ -0,0 +1,36 @@
|
|||||||
|
use std::{
|
||||||
|
env::{self, consts::ARCH},
|
||||||
|
path::PathBuf,
|
||||||
|
};
|
||||||
|
|
||||||
|
fn main() {
|
||||||
|
let out = PathBuf::from(
|
||||||
|
env::var("OUT_DIR").expect("Expected OUT_DIR to be defined in the environment"),
|
||||||
|
);
|
||||||
|
|
||||||
|
let fixedpt_bits = match ARCH {
|
||||||
|
"x86" => "32",
|
||||||
|
#[cfg(feature = "long_bit_32")]
|
||||||
|
"x86_64" => "32",
|
||||||
|
#[cfg(not(feature = "long_bit_32"))]
|
||||||
|
"x86_64" => "64",
|
||||||
|
a => panic!("unsupported/untested architecture: {a}"),
|
||||||
|
};
|
||||||
|
let mut compiler = cc::Build::new();
|
||||||
|
compiler
|
||||||
|
.file("src/libmaccel.c")
|
||||||
|
.define("FIXEDPT_BITS", fixedpt_bits);
|
||||||
|
|
||||||
|
if cfg!(feature = "dbg") {
|
||||||
|
compiler.define("DEBUG", "1");
|
||||||
|
compiler.debug(true);
|
||||||
|
}
|
||||||
|
|
||||||
|
compiler.compile("maccel");
|
||||||
|
|
||||||
|
println!("cargo:rust-link-search=static={}", out.display());
|
||||||
|
|
||||||
|
const DRIVER_DIR: &str = "../../driver";
|
||||||
|
println!("cargo:rerun-if-changed={DRIVER_DIR}");
|
||||||
|
println!("cargo:rerun-if-changed=src/libmaccel.c");
|
||||||
|
}
|
||||||
@@ -0,0 +1,11 @@
|
|||||||
|
mod context;
|
||||||
|
pub mod inputspeed;
|
||||||
|
mod libmaccel;
|
||||||
|
mod params;
|
||||||
|
pub mod persist;
|
||||||
|
mod sens_fns;
|
||||||
|
|
||||||
|
pub use context::*;
|
||||||
|
pub use libmaccel::fixedptc;
|
||||||
|
pub use params::*;
|
||||||
|
pub use sens_fns::*;
|
||||||
@@ -0,0 +1,14 @@
|
|||||||
|
#include "../../../driver/accel_rs.h"
|
||||||
|
#include "../../../driver/fixedptc.h"
|
||||||
|
|
||||||
|
char *fpt_to_str(fpt num);
|
||||||
|
fpt str_to_fpt(char *string);
|
||||||
|
double fpt_to_float(fpt value);
|
||||||
|
fpt fpt_from_float(double value);
|
||||||
|
|
||||||
|
extern char *fpt_to_str(fpt num) { return fptoa(num); }
|
||||||
|
extern fpt str_to_fpt(char *string) { return atofp(string); }
|
||||||
|
|
||||||
|
extern double fpt_to_float(fpt value) { return fpt_todouble(value); }
|
||||||
|
|
||||||
|
extern fpt fpt_from_float(double value) { return fpt_rconst(value); }
|
||||||
@@ -0,0 +1,91 @@
|
|||||||
|
pub mod fixedptc {
|
||||||
|
use std::{
|
||||||
|
ffi::{CStr, CString},
|
||||||
|
str::FromStr,
|
||||||
|
};
|
||||||
|
|
||||||
|
use anyhow::Context;
|
||||||
|
|
||||||
|
use super::c_libmaccel::{self, str_to_fpt};
|
||||||
|
|
||||||
|
#[derive(Debug, Default, Clone, Copy, PartialEq)]
|
||||||
|
#[repr(transparent)]
|
||||||
|
pub struct Fpt(pub i64);
|
||||||
|
|
||||||
|
impl From<Fpt> for f64 {
|
||||||
|
fn from(value: Fpt) -> Self {
|
||||||
|
unsafe { c_libmaccel::fpt_to_float(value) }
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
impl From<f64> for Fpt {
|
||||||
|
fn from(value: f64) -> Self {
|
||||||
|
unsafe { c_libmaccel::fpt_from_float(value) }
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
#[cfg(test)]
|
||||||
|
#[test]
|
||||||
|
fn fpt_and_float_conversion_to_and_fro() {
|
||||||
|
macro_rules! assert_for {
|
||||||
|
($value:literal) => {{
|
||||||
|
let fp = Fpt::from($value);
|
||||||
|
assert_eq!(f64::from(fp), $value);
|
||||||
|
}};
|
||||||
|
}
|
||||||
|
|
||||||
|
assert_for!(1.5);
|
||||||
|
assert_for!(4.5);
|
||||||
|
assert_for!(1.0);
|
||||||
|
assert_for!(0.0);
|
||||||
|
assert_for!(0.125);
|
||||||
|
assert_for!(0.5);
|
||||||
|
}
|
||||||
|
|
||||||
|
impl<'a> TryFrom<&'a Fpt> for &'a str {
|
||||||
|
type Error = anyhow::Error;
|
||||||
|
|
||||||
|
fn try_from(value: &'a Fpt) -> Result<Self, Self::Error> {
|
||||||
|
unsafe {
|
||||||
|
let s = CStr::from_ptr(c_libmaccel::fpt_to_str(*value));
|
||||||
|
let s = core::str::from_utf8(s.to_bytes())?;
|
||||||
|
Ok(s)
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
impl FromStr for Fpt {
|
||||||
|
type Err = anyhow::Error;
|
||||||
|
|
||||||
|
fn from_str(s: &str) -> Result<Self, Self::Err> {
|
||||||
|
let cstr = CString::new(s).context("Failed to convert to a C string")?;
|
||||||
|
let f = unsafe { str_to_fpt(cstr.as_ptr()) };
|
||||||
|
Ok(f)
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
#[repr(C)]
|
||||||
|
pub struct Vector {
|
||||||
|
pub x: i64,
|
||||||
|
pub y: i64,
|
||||||
|
}
|
||||||
|
|
||||||
|
mod c_libmaccel {
|
||||||
|
use super::{Vector, fixedptc};
|
||||||
|
use crate::params::AccelParams;
|
||||||
|
use std::ffi::c_char;
|
||||||
|
|
||||||
|
unsafe extern "C" {
|
||||||
|
pub fn sensitivity_rs(speed_in: fixedptc::Fpt, args: AccelParams) -> Vector;
|
||||||
|
}
|
||||||
|
|
||||||
|
unsafe extern "C" {
|
||||||
|
pub fn fpt_to_str(num: fixedptc::Fpt) -> *const c_char;
|
||||||
|
pub fn str_to_fpt(string: *const c_char) -> fixedptc::Fpt;
|
||||||
|
pub fn fpt_from_float(value: f64) -> fixedptc::Fpt;
|
||||||
|
pub fn fpt_to_float(value: fixedptc::Fpt) -> f64;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub use c_libmaccel::sensitivity_rs;
|
||||||
@@ -0,0 +1,358 @@
|
|||||||
|
use crate::libmaccel::fixedptc::Fpt;
|
||||||
|
use paste::paste;
|
||||||
|
|
||||||
|
/// Declare an enum for every parameter.
|
||||||
|
macro_rules! declare_common_params {
|
||||||
|
($($param:tt,)+) => {
|
||||||
|
#[cfg_attr(feature = "clap", derive(clap::ValueEnum))]
|
||||||
|
#[derive(Debug, Clone, Copy, PartialEq)]
|
||||||
|
pub enum Param {
|
||||||
|
$($param),+
|
||||||
|
}
|
||||||
|
|
||||||
|
paste!(
|
||||||
|
#[derive(Debug)]
|
||||||
|
pub struct AllParamArgs {
|
||||||
|
$( pub [< $param:snake:lower >]: Fpt ),+
|
||||||
|
}
|
||||||
|
);
|
||||||
|
|
||||||
|
pub const ALL_PARAMS: &[Param] = &[ $(Param::$param),+ ];
|
||||||
|
};
|
||||||
|
}
|
||||||
|
|
||||||
|
// Helper macro to create FFI-safe curve parameter structs
|
||||||
|
macro_rules! make_curve_params_struct {
|
||||||
|
// Case: has parameters
|
||||||
|
($mode:tt, $($param:tt),+) => {
|
||||||
|
paste! {
|
||||||
|
#[repr(C)]
|
||||||
|
#[derive(Debug, Clone, Copy, PartialEq, Default)]
|
||||||
|
pub struct [< $mode CurveParams >] {
|
||||||
|
$( pub [< $param:snake:lower >]: Fpt ),+
|
||||||
|
}
|
||||||
|
}
|
||||||
|
};
|
||||||
|
// Case: no parameters, add a ZST field for FFI safety
|
||||||
|
($mode:tt, ) => {
|
||||||
|
paste! {
|
||||||
|
#[repr(C)]
|
||||||
|
#[derive(Debug, Clone, Copy, PartialEq, Default)]
|
||||||
|
pub struct [< $mode CurveParams >] {
|
||||||
|
pub _ffi_guard: [u8; 0],
|
||||||
|
}
|
||||||
|
}
|
||||||
|
};
|
||||||
|
}
|
||||||
|
|
||||||
|
macro_rules! declare_params {
|
||||||
|
( Common { $($common_param:tt),+$(,)? } , $( $mode:tt { $($param:tt),*$(,)? }, )+) => {
|
||||||
|
declare_common_params! {
|
||||||
|
$( $common_param, )+
|
||||||
|
$( $( $param, )* )+
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Array of all the common parameters for convenience.
|
||||||
|
pub const ALL_COMMON_PARAMS: &[Param] = &[ $( Param::$common_param),+ ];
|
||||||
|
|
||||||
|
|
||||||
|
#[cfg_attr(feature = "clap", derive(clap::ValueEnum))]
|
||||||
|
#[derive(Debug, Default, PartialEq, Clone, Copy)]
|
||||||
|
#[repr(u8)]
|
||||||
|
pub enum AccelMode {
|
||||||
|
#[default]
|
||||||
|
$( $mode, )+
|
||||||
|
}
|
||||||
|
|
||||||
|
pub const ALL_MODES: &[AccelMode] = &[ $( AccelMode::$mode, )+ ];
|
||||||
|
|
||||||
|
paste! {
|
||||||
|
/// Define the complete shape (and memory layout) of the argument
|
||||||
|
/// of the sensitivity function as it is expected to be in `C`
|
||||||
|
#[repr(C)]
|
||||||
|
pub struct AccelParams {
|
||||||
|
$( pub [< $common_param:snake:lower >] : Fpt, )+
|
||||||
|
pub by_mode: AccelParamsByMode,
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Represents the tagged union of curve-specific parameters.
|
||||||
|
#[repr(C, u8)]
|
||||||
|
pub enum AccelParamsByMode {
|
||||||
|
$(
|
||||||
|
$mode([< $mode CurveParams >] ),
|
||||||
|
)+
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Represents the common parameters and their float values.
|
||||||
|
/// Use it to bulk set the common parameters.
|
||||||
|
#[cfg_attr(feature = "clap", derive(clap::Args))]
|
||||||
|
#[derive(Debug, Clone, Copy, PartialEq)]
|
||||||
|
pub struct CommonParamArgs {
|
||||||
|
$( pub [< $common_param:snake:lower >]: f64 ),+
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
paste! {
|
||||||
|
$(
|
||||||
|
// Use the helper macro to define the struct
|
||||||
|
make_curve_params_struct!($mode, $($param),*);
|
||||||
|
|
||||||
|
#[doc = "Array of all parameters for the `" $mode "` mode for convenience." ]
|
||||||
|
pub const [< ALL_ $mode:upper _PARAMS >]: &[Param] = &[ $( Param::$param),* ];
|
||||||
|
|
||||||
|
#[doc = "Represents the parameters for `" $mode "` curve and their float values"]
|
||||||
|
/// Use it to bulk set the curve's parameters.
|
||||||
|
#[cfg_attr(feature = "clap", derive(clap::Args))]
|
||||||
|
#[derive(Debug, Clone, Copy, PartialEq)]
|
||||||
|
pub struct [< $mode ParamArgs >] {
|
||||||
|
$( pub [< $param:snake:lower >]: f64 ),*
|
||||||
|
}
|
||||||
|
)+
|
||||||
|
|
||||||
|
/// Subcommands for the CLI
|
||||||
|
#[cfg(feature = "clap")]
|
||||||
|
pub mod subcommads {
|
||||||
|
#[derive(clap::Subcommand)]
|
||||||
|
pub enum SetParamByModesSubcommands {
|
||||||
|
/// Set all the common parameters
|
||||||
|
Common(super::CommonParamArgs),
|
||||||
|
$(
|
||||||
|
#[doc = "Set all the parameters for the " $mode " curve" ]
|
||||||
|
$mode(super::[< $mode ParamArgs >]),
|
||||||
|
)+
|
||||||
|
}
|
||||||
|
|
||||||
|
#[derive(clap::Subcommand)]
|
||||||
|
pub enum CliSubcommandSetParams {
|
||||||
|
/// Set the value for a single parameter
|
||||||
|
Param { name: crate::params::Param, value: f64 },
|
||||||
|
/// Set the acceleration mode (curve)
|
||||||
|
Mode { mode: crate::params::AccelMode },
|
||||||
|
/// Set the values for all parameters for a curve in order
|
||||||
|
All {
|
||||||
|
#[clap(subcommand)]
|
||||||
|
command: SetParamByModesSubcommands
|
||||||
|
},
|
||||||
|
}
|
||||||
|
|
||||||
|
#[derive(clap::Subcommand)]
|
||||||
|
pub enum GetParamsByModesSubcommands {
|
||||||
|
/// Get all the common parameters
|
||||||
|
Common,
|
||||||
|
$(
|
||||||
|
#[doc = "Get all the parameters for the " $mode " curve" ]
|
||||||
|
$mode
|
||||||
|
),+
|
||||||
|
}
|
||||||
|
|
||||||
|
#[derive(clap::Subcommand)]
|
||||||
|
pub enum CliSubcommandGetParams {
|
||||||
|
/// Get the value for a single parameter
|
||||||
|
Param { name: crate::params::Param },
|
||||||
|
/// Get the current acceleration mode (curve)
|
||||||
|
Mode,
|
||||||
|
/// Get the values for all parameters for a curve in order
|
||||||
|
All {
|
||||||
|
/// Print the values in one line, separated by a space
|
||||||
|
#[arg(long)]
|
||||||
|
oneline: bool,
|
||||||
|
#[arg(short, long)]
|
||||||
|
/// Print only the values
|
||||||
|
quiet: bool,
|
||||||
|
|
||||||
|
#[clap(subcommand)]
|
||||||
|
command: GetParamsByModesSubcommands
|
||||||
|
},
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
};
|
||||||
|
}
|
||||||
|
|
||||||
|
declare_params!(
|
||||||
|
Common {
|
||||||
|
SensMult,
|
||||||
|
YxRatio,
|
||||||
|
InputDpi,
|
||||||
|
AngleRotation
|
||||||
|
},
|
||||||
|
Linear {
|
||||||
|
Accel,
|
||||||
|
OffsetLinear,
|
||||||
|
OutputCap,
|
||||||
|
},
|
||||||
|
Natural {
|
||||||
|
DecayRate,
|
||||||
|
OffsetNatural,
|
||||||
|
Limit,
|
||||||
|
},
|
||||||
|
Synchronous {
|
||||||
|
Gamma,
|
||||||
|
Smooth,
|
||||||
|
Motivity,
|
||||||
|
SyncSpeed,
|
||||||
|
},
|
||||||
|
NoAccel {},
|
||||||
|
);
|
||||||
|
|
||||||
|
impl AccelMode {
|
||||||
|
pub fn as_title(&self) -> &'static str {
|
||||||
|
match self {
|
||||||
|
AccelMode::Linear => "Linear Acceleration",
|
||||||
|
AccelMode::Natural => "Natural (w/ Gain)",
|
||||||
|
AccelMode::Synchronous => "Synchronous",
|
||||||
|
AccelMode::NoAccel => "No Acceleration",
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
impl AccelMode {
|
||||||
|
pub const PARAM_NAME: &'static str = "MODE";
|
||||||
|
|
||||||
|
pub fn ordinal(&self) -> i64 {
|
||||||
|
(*self as i8).into()
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
impl Param {
|
||||||
|
/// The canonical internal name of the parameter.
|
||||||
|
pub fn name(&self) -> &'static str {
|
||||||
|
match self {
|
||||||
|
Param::SensMult => "SENS_MULT",
|
||||||
|
Param::YxRatio => "YX_RATIO",
|
||||||
|
Param::InputDpi => "INPUT_DPI",
|
||||||
|
Param::Accel => "ACCEL",
|
||||||
|
Param::OffsetLinear => "OFFSET",
|
||||||
|
Param::OffsetNatural => "OFFSET",
|
||||||
|
Param::OutputCap => "OUTPUT_CAP",
|
||||||
|
Param::DecayRate => "DECAY_RATE",
|
||||||
|
Param::Limit => "LIMIT",
|
||||||
|
Param::Gamma => "GAMMA",
|
||||||
|
Param::Smooth => "SMOOTH",
|
||||||
|
Param::Motivity => "MOTIVITY",
|
||||||
|
Param::SyncSpeed => "SYNC_SPEED",
|
||||||
|
Param::AngleRotation => "ANGLE_ROTATION",
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub fn display_name(&self) -> &'static str {
|
||||||
|
match self {
|
||||||
|
Param::SensMult => "Sens-Multiplier",
|
||||||
|
Param::Accel => "Accel",
|
||||||
|
Param::InputDpi => "Input DPI",
|
||||||
|
Param::OffsetLinear => "Offset",
|
||||||
|
Param::OffsetNatural => "Offset",
|
||||||
|
Param::OutputCap => "Output-Cap",
|
||||||
|
Param::YxRatio => "Y/x Ratio",
|
||||||
|
Param::DecayRate => "Decay-Rate",
|
||||||
|
Param::Limit => "Limit",
|
||||||
|
Param::Gamma => "Gamma",
|
||||||
|
Param::Smooth => "Smooth",
|
||||||
|
Param::Motivity => "Motivity",
|
||||||
|
Param::SyncSpeed => "Sync Speed",
|
||||||
|
Param::AngleRotation => "Angle Rotation",
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub fn description(&self) -> &'static str {
|
||||||
|
match self {
|
||||||
|
Param::SensMult => "Base sensitivity multiplier. Adjusts overall mouse speed.",
|
||||||
|
Param::YxRatio => {
|
||||||
|
"Y to X axis sensitivity ratio. Values > 1 increase vertical sensitivity."
|
||||||
|
}
|
||||||
|
Param::InputDpi => {
|
||||||
|
"Mouse DPI. Used to normalize to 1000 DPI equivalent for consistent acceleration."
|
||||||
|
}
|
||||||
|
Param::AngleRotation => "Rotation angle in degrees for sensitivity direction.",
|
||||||
|
Param::Accel => "Acceleration strength. Higher values = faster cursor at high speeds.",
|
||||||
|
Param::OffsetLinear => "Speed threshold (counts/ms) before acceleration begins.",
|
||||||
|
Param::OutputCap => "Maximum sensitivity multiplier cap. Prevents excessive speed.",
|
||||||
|
Param::DecayRate => "How quickly acceleration decays. Higher = faster decay.",
|
||||||
|
Param::OffsetNatural => "Speed threshold (counts/ms) for natural curve activation.",
|
||||||
|
Param::Limit => "Maximum gain limit for natural acceleration.",
|
||||||
|
Param::Gamma => "Exponent controlling curve shape. Higher = more aggressive ramp-up.",
|
||||||
|
Param::Smooth => "Smoothing factor (0-1). Higher = more gradual transitions.",
|
||||||
|
Param::Motivity => "Degree of acceleration effect. Must be > 1.",
|
||||||
|
Param::SyncSpeed => "Synchronization speed. Controls how fast sync responds.",
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub(crate) fn format_param_value(value: f64) -> String {
|
||||||
|
let mut number = format!("{value:.5}");
|
||||||
|
|
||||||
|
for idx in (1..number.len()).rev() {
|
||||||
|
let this_char = &number[idx..idx + 1];
|
||||||
|
if this_char != "0" {
|
||||||
|
if this_char == "." {
|
||||||
|
number.remove(idx);
|
||||||
|
}
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
number.remove(idx);
|
||||||
|
}
|
||||||
|
|
||||||
|
number
|
||||||
|
}
|
||||||
|
|
||||||
|
#[cfg(test)]
|
||||||
|
#[test]
|
||||||
|
fn format_param_value_works() {
|
||||||
|
assert_eq!(format_param_value(1.5), "1.5");
|
||||||
|
assert_eq!(format_param_value(1.50), "1.5");
|
||||||
|
assert_eq!(format_param_value(100.0), "100");
|
||||||
|
assert_eq!(format_param_value(0.0600), "0.06");
|
||||||
|
assert_eq!(format_param_value(0.055000), "0.055");
|
||||||
|
}
|
||||||
|
|
||||||
|
pub(crate) fn validate_param_value(param_tag: Param, value: f64) -> anyhow::Result<()> {
|
||||||
|
match param_tag {
|
||||||
|
Param::SensMult => {}
|
||||||
|
Param::YxRatio => {}
|
||||||
|
Param::InputDpi => {
|
||||||
|
if value <= 0.0 {
|
||||||
|
anyhow::bail!("Input DPI must be positive");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::AngleRotation => {}
|
||||||
|
Param::Accel => {}
|
||||||
|
Param::OutputCap => {}
|
||||||
|
Param::OffsetLinear | Param::OffsetNatural => {
|
||||||
|
if value < 0.0 {
|
||||||
|
anyhow::bail!("offset cannot be less than 0");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::DecayRate => {
|
||||||
|
if value <= 0.0 {
|
||||||
|
anyhow::bail!("decay rate must be positive");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::Limit => {
|
||||||
|
if value < 1.0 {
|
||||||
|
anyhow::bail!("limit cannot be less than 1");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::Gamma => {
|
||||||
|
if value <= 0.0 {
|
||||||
|
anyhow::bail!("Gamma must be positive");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::Smooth => {
|
||||||
|
if !(0.0..=1.0).contains(&value) {
|
||||||
|
anyhow::bail!("Smooth must be between 0 and 1");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::Motivity => {
|
||||||
|
if value <= 1.0 {
|
||||||
|
anyhow::bail!("Motivity must be greater than 1");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
Param::SyncSpeed => {
|
||||||
|
if value <= 0.0 {
|
||||||
|
anyhow::bail!("'Synchronous speed' must be positive");
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
Ok(())
|
||||||
|
}
|
||||||
@@ -0,0 +1,53 @@
|
|||||||
|
use crate::{
|
||||||
|
AccelParams, AccelParamsByMode, LinearCurveParams, NaturalCurveParams, SynchronousCurveParams,
|
||||||
|
libmaccel::{self, fixedptc::Fpt},
|
||||||
|
params::AllParamArgs,
|
||||||
|
};
|
||||||
|
|
||||||
|
use crate::AccelMode;
|
||||||
|
|
||||||
|
impl AllParamArgs {
|
||||||
|
fn convert_to_accel_args(&self, mode: AccelMode) -> AccelParams {
|
||||||
|
let params_by_mode = match mode {
|
||||||
|
AccelMode::Linear => AccelParamsByMode::Linear(LinearCurveParams {
|
||||||
|
accel: self.accel,
|
||||||
|
offset_linear: self.offset_linear,
|
||||||
|
output_cap: self.output_cap,
|
||||||
|
}),
|
||||||
|
AccelMode::Natural => AccelParamsByMode::Natural(NaturalCurveParams {
|
||||||
|
decay_rate: self.decay_rate,
|
||||||
|
offset_natural: self.offset_natural,
|
||||||
|
limit: self.limit,
|
||||||
|
}),
|
||||||
|
AccelMode::Synchronous => AccelParamsByMode::Synchronous(SynchronousCurveParams {
|
||||||
|
gamma: self.gamma,
|
||||||
|
smooth: self.smooth,
|
||||||
|
motivity: self.motivity,
|
||||||
|
sync_speed: self.sync_speed,
|
||||||
|
}),
|
||||||
|
AccelMode::NoAccel => {
|
||||||
|
AccelParamsByMode::NoAccel(crate::params::NoAccelCurveParams { _ffi_guard: [] })
|
||||||
|
}
|
||||||
|
};
|
||||||
|
|
||||||
|
AccelParams {
|
||||||
|
sens_mult: self.sens_mult,
|
||||||
|
yx_ratio: self.yx_ratio,
|
||||||
|
input_dpi: self.input_dpi,
|
||||||
|
angle_rotation: self.angle_rotation,
|
||||||
|
by_mode: params_by_mode,
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub type SensXY = (f64, f64);
|
||||||
|
|
||||||
|
/// Ratio of Output speed to Input speed
|
||||||
|
pub fn sensitivity(s_in: f64, mode: AccelMode, params: &AllParamArgs) -> SensXY {
|
||||||
|
let sens =
|
||||||
|
unsafe { libmaccel::sensitivity_rs(s_in.into(), params.convert_to_accel_args(mode)) };
|
||||||
|
let ratio_x: f64 = Fpt(sens.x).into();
|
||||||
|
let ratio_y: f64 = Fpt(sens.y).into();
|
||||||
|
|
||||||
|
(ratio_x, ratio_y)
|
||||||
|
}
|
||||||
@@ -0,0 +1,6 @@
|
|||||||
|
PACKAGE_NAME="@_PKGNAME@"
|
||||||
|
PACKAGE_VERSION="@PKGVER@"
|
||||||
|
MAKE[0]="make KVER=$kernelver DRIVER_CFLAGS=@DRIVER_CFLAGS@"
|
||||||
|
BUILT_MODULE_NAME[0]="@_PKGNAME@"
|
||||||
|
DEST_MODULE_LOCATION[0]="/kernel/drivers/usb"
|
||||||
|
AUTOINSTALL="yes"
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
accel_test
|
||||||
@@ -0,0 +1,75 @@
|
|||||||
|
#include <linux/types.h>
|
||||||
|
|
||||||
|
#ifndef __KERNEL__
|
||||||
|
#include <stdint.h>
|
||||||
|
#endif // !__KERNEL__
|
||||||
|
|
||||||
|
/**
|
||||||
|
* [Yeetmouse](https://github.com/AndyFilter/YeetMouse/blob/master/driver/FixedMath/Fixed64.h#L1360)
|
||||||
|
* has better string utils. FP64_ToString there doesn't require
|
||||||
|
* `__udivmodti4` in 64-bit mode.
|
||||||
|
*
|
||||||
|
*/
|
||||||
|
|
||||||
|
typedef int32_t FP_INT;
|
||||||
|
typedef int64_t FP_LONG;
|
||||||
|
|
||||||
|
#define FP64_Shift 32
|
||||||
|
|
||||||
|
static inline FP_LONG FP64_Mul(FP_LONG a, FP_LONG b) {
|
||||||
|
return (FP_LONG)(((__int128_t)a * (__int128_t)b) >> FP64_Shift);
|
||||||
|
}
|
||||||
|
|
||||||
|
static char *FP_64_itoa_loop(char *buf, uint64_t scale, uint64_t value,
|
||||||
|
int skip) {
|
||||||
|
while (scale) {
|
||||||
|
unsigned digit = (value / scale);
|
||||||
|
|
||||||
|
if (!skip || digit || scale == 1) {
|
||||||
|
skip = 0;
|
||||||
|
*buf++ = '0' + digit;
|
||||||
|
value %= scale;
|
||||||
|
}
|
||||||
|
|
||||||
|
scale /= 10;
|
||||||
|
}
|
||||||
|
return buf;
|
||||||
|
}
|
||||||
|
|
||||||
|
void FP64_ToString(FP_LONG value, char *buf);
|
||||||
|
|
||||||
|
void FP64_ToString(FP_LONG value, char *buf) {
|
||||||
|
uint64_t uvalue = (value >= 0) ? value : -value;
|
||||||
|
if (value < 0)
|
||||||
|
*buf++ = '-';
|
||||||
|
|
||||||
|
#define SCALE 9
|
||||||
|
|
||||||
|
static const uint64_t FP_64_scales[10] = {
|
||||||
|
/* 18 decimals is enough for full 64bit fixed point precision */
|
||||||
|
1, 10, 100, 1000, 10000,
|
||||||
|
100000, 1000000, 10000000, 100000000, 1000000000};
|
||||||
|
|
||||||
|
/* Separate the integer and decimal parts of the value */
|
||||||
|
uint64_t intpart = uvalue >> 32;
|
||||||
|
uint64_t fracpart = uvalue & 0xFFFFFFFF;
|
||||||
|
uint64_t scale = FP_64_scales[SCALE];
|
||||||
|
fracpart = FP64_Mul(fracpart, scale);
|
||||||
|
|
||||||
|
if (fracpart >= scale) {
|
||||||
|
/* Handle carry from decimal part */
|
||||||
|
intpart++;
|
||||||
|
fracpart -= scale;
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Format integer part */
|
||||||
|
buf = FP_64_itoa_loop(buf, 1000000000, intpart, 1);
|
||||||
|
|
||||||
|
/* Format decimal part (if any) */
|
||||||
|
if (scale != 1) {
|
||||||
|
*buf++ = '.';
|
||||||
|
buf = FP_64_itoa_loop(buf, scale / 10, fracpart, 0);
|
||||||
|
}
|
||||||
|
|
||||||
|
*buf = '\0';
|
||||||
|
}
|
||||||
@@ -0,0 +1,31 @@
|
|||||||
|
ifneq ($(KERNELRELEASE),)
|
||||||
|
obj-m := maccel.o
|
||||||
|
ccflags-y += $(DRIVER_CFLAGS)
|
||||||
|
endif
|
||||||
|
|
||||||
|
KVER ?= $(shell uname -r)
|
||||||
|
KDIR ?= /lib/modules/$(KVER)/build
|
||||||
|
|
||||||
|
DRIVER_CFLAGS ?= -DFIXEDPT_BITS=$(shell getconf LONG_BIT)
|
||||||
|
|
||||||
|
ifneq ($(CC),clang)
|
||||||
|
CC=gcc
|
||||||
|
else
|
||||||
|
export LLVM=1
|
||||||
|
endif
|
||||||
|
|
||||||
|
build:
|
||||||
|
$(MAKE) CC=$(CC) -C $(KDIR) M=$(CURDIR)
|
||||||
|
|
||||||
|
build_debug: DRIVER_CFLAGS += -g -DDEBUG
|
||||||
|
build_debug: build
|
||||||
|
|
||||||
|
clean:
|
||||||
|
$(MAKE) -C $(KDIR) M=$(CURDIR) clean
|
||||||
|
|
||||||
|
test_debug: DRIVER_CFLAGS += -g -DDEBUG
|
||||||
|
test_debug: test
|
||||||
|
|
||||||
|
test: **/*.test.c
|
||||||
|
@mkdir -p tests/snapshots
|
||||||
|
DRIVER_CFLAGS="$(DRIVER_CFLAGS)" TEST_NAME=$(name) sh tests/run_tests.sh
|
||||||
@@ -0,0 +1,140 @@
|
|||||||
|
#ifndef _ACCEL_H_
|
||||||
|
#define _ACCEL_H_
|
||||||
|
|
||||||
|
#include "accel/linear.h"
|
||||||
|
#include "accel/mode.h"
|
||||||
|
#include "accel/natural.h"
|
||||||
|
#include "accel/synchronous.h"
|
||||||
|
#include "dbg.h"
|
||||||
|
#include "fixedptc.h"
|
||||||
|
#include "math.h"
|
||||||
|
#include "speed.h"
|
||||||
|
|
||||||
|
struct no_accel_curve_args {};
|
||||||
|
|
||||||
|
union __accel_args {
|
||||||
|
struct natural_curve_args natural;
|
||||||
|
struct linear_curve_args linear;
|
||||||
|
struct synchronous_curve_args synchronous;
|
||||||
|
struct no_accel_curve_args no_accel;
|
||||||
|
};
|
||||||
|
|
||||||
|
struct accel_args {
|
||||||
|
fpt sens_mult;
|
||||||
|
fpt yx_ratio;
|
||||||
|
fpt input_dpi;
|
||||||
|
fpt angle_rotation_deg;
|
||||||
|
|
||||||
|
enum accel_mode tag;
|
||||||
|
union __accel_args args;
|
||||||
|
};
|
||||||
|
|
||||||
|
const fpt NORMALIZED_DPI = fpt_fromint(1000);
|
||||||
|
|
||||||
|
/**
|
||||||
|
* Calculate the factor by which to multiply the input vector
|
||||||
|
* in order to get the desired output speed.
|
||||||
|
*
|
||||||
|
*/
|
||||||
|
static inline struct vector sensitivity(fpt input_speed,
|
||||||
|
struct accel_args args) {
|
||||||
|
fpt sens;
|
||||||
|
|
||||||
|
switch (args.tag) {
|
||||||
|
case synchronous:
|
||||||
|
dbg("accel mode %d: synchronous", args.tag);
|
||||||
|
sens = __synchronous_sens_fun(input_speed, args.args.synchronous);
|
||||||
|
break;
|
||||||
|
case natural:
|
||||||
|
dbg("accel mode %d: natural", args.tag);
|
||||||
|
sens = __natural_sens_fun(input_speed, args.args.natural);
|
||||||
|
break;
|
||||||
|
case linear:
|
||||||
|
dbg("accel mode %d: linear", args.tag);
|
||||||
|
sens = __linear_sens_fun(input_speed, args.args.linear);
|
||||||
|
break;
|
||||||
|
case no_accel:
|
||||||
|
dbg("accel mode %d: no_accel", args.tag);
|
||||||
|
sens = FIXEDPT_ONE;
|
||||||
|
break;
|
||||||
|
default:
|
||||||
|
sens = FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
sens = fpt_mul(sens, args.sens_mult);
|
||||||
|
return (struct vector){sens, fpt_mul(sens, args.yx_ratio)};
|
||||||
|
}
|
||||||
|
|
||||||
|
const fpt DEG_TO_RAD_FACTOR = fpt_xdiv(FIXEDPT_PI, fpt_rconst(180));
|
||||||
|
|
||||||
|
static inline void f_accelerate(int *x, int *y, fpt time_interval_ms,
|
||||||
|
struct accel_args args) {
|
||||||
|
static fpt carry_x = 0;
|
||||||
|
static fpt carry_y = 0;
|
||||||
|
|
||||||
|
fpt dx = fpt_fromint(*x);
|
||||||
|
fpt dy = fpt_fromint(*y);
|
||||||
|
|
||||||
|
{
|
||||||
|
if (args.angle_rotation_deg == 0) {
|
||||||
|
goto accel_routine;
|
||||||
|
}
|
||||||
|
// Add rotation of input vector
|
||||||
|
fpt degrees = args.angle_rotation_deg;
|
||||||
|
fpt radians =
|
||||||
|
fpt_mul(degrees, DEG_TO_RAD_FACTOR); // Convert degrees to radians
|
||||||
|
|
||||||
|
fpt cos_angle = fpt_cos(radians);
|
||||||
|
fpt sin_angle = fpt_sin(radians);
|
||||||
|
|
||||||
|
dbg("rotation angle(deg): %s deg", fptoa(degrees));
|
||||||
|
dbg("rotation angle(rad): %s rad", fptoa(radians));
|
||||||
|
dbg("cosine of rotation: %s", fptoa(cos_angle));
|
||||||
|
dbg("sine of rotation: %s", fptoa(sin_angle));
|
||||||
|
|
||||||
|
// Rotate input vector
|
||||||
|
fpt dx_rot = fpt_mul(dx, cos_angle) - fpt_mul(dy, sin_angle);
|
||||||
|
fpt dy_rot = fpt_mul(dx, sin_angle) + fpt_mul(dy, cos_angle);
|
||||||
|
|
||||||
|
dbg("rotated x: %s", fptoa(dx_rot));
|
||||||
|
dbg("rotated y: %s", fptoa(dy_rot));
|
||||||
|
|
||||||
|
dx = dx_rot;
|
||||||
|
dy = dy_rot;
|
||||||
|
}
|
||||||
|
accel_routine:
|
||||||
|
|
||||||
|
dbg("in (%d, %d)", *x, *y);
|
||||||
|
dbg("in: x (fpt conversion) %s", fptoa(dx));
|
||||||
|
dbg("in: y (fpt conversion) %s", fptoa(dy));
|
||||||
|
|
||||||
|
fpt dpi_factor = fpt_div(NORMALIZED_DPI, args.input_dpi);
|
||||||
|
dbg("dpi adjustment factor: %s", fptoa(dpi_factor));
|
||||||
|
dx = fpt_mul(dx, dpi_factor);
|
||||||
|
dy = fpt_mul(dy, dpi_factor);
|
||||||
|
|
||||||
|
fpt speed_in = input_speed(dx, dy, time_interval_ms);
|
||||||
|
struct vector sens = sensitivity(speed_in, args);
|
||||||
|
dbg("scale x %s", fptoa(sens.x));
|
||||||
|
dbg("scale y %s", fptoa(sens.y));
|
||||||
|
|
||||||
|
fpt dx_out = fpt_mul(dx, sens.x);
|
||||||
|
fpt dy_out = fpt_mul(dy, sens.y);
|
||||||
|
|
||||||
|
dx_out = fpt_add(dx_out, carry_x);
|
||||||
|
dy_out = fpt_add(dy_out, carry_y);
|
||||||
|
|
||||||
|
dbg("out: x %s", fptoa(dx_out));
|
||||||
|
dbg("out: y %s", fptoa(dy_out));
|
||||||
|
|
||||||
|
*x = fpt_toint(dx_out);
|
||||||
|
*y = fpt_toint(dy_out);
|
||||||
|
|
||||||
|
dbg("out (int conversion) (%d, %d)", *x, *y);
|
||||||
|
|
||||||
|
carry_x = fpt_sub(dx_out, fpt_fromint(*x));
|
||||||
|
carry_y = fpt_sub(dy_out, fpt_fromint(*y));
|
||||||
|
|
||||||
|
dbg("carry (%s, %s)", fptoa(carry_x), fptoa(carry_x));
|
||||||
|
}
|
||||||
|
|
||||||
|
#endif
|
||||||
@@ -0,0 +1,50 @@
|
|||||||
|
#ifndef __ACCEL_LINEAR_H_
|
||||||
|
#define __ACCEL_LINEAR_H_
|
||||||
|
|
||||||
|
#include "../dbg.h"
|
||||||
|
#include "../fixedptc.h"
|
||||||
|
#include "../math.h"
|
||||||
|
|
||||||
|
struct linear_curve_args {
|
||||||
|
fpt accel;
|
||||||
|
fpt offset;
|
||||||
|
fpt output_cap;
|
||||||
|
};
|
||||||
|
|
||||||
|
static inline fpt linear_base_fn(fpt x, fpt accel,
|
||||||
|
fpt input_offset) {
|
||||||
|
fpt _x = x - input_offset;
|
||||||
|
fpt _x_square = fpt_mul(
|
||||||
|
_x, _x); // because linear in rawaccel is classic with exponent = 2
|
||||||
|
return fpt_mul(accel, fpt_div(_x_square, x));
|
||||||
|
}
|
||||||
|
|
||||||
|
/**
|
||||||
|
* Sensitivity Function for Linear Acceleration
|
||||||
|
*/
|
||||||
|
static inline fpt __linear_sens_fun(fpt input_speed,
|
||||||
|
struct linear_curve_args args) {
|
||||||
|
dbg("linear: accel %s", fptoa(args.accel));
|
||||||
|
dbg("linear: offset %s", fptoa(args.offset));
|
||||||
|
dbg("linear: output_cap %s", fptoa(args.output_cap));
|
||||||
|
|
||||||
|
if (input_speed <= args.offset) {
|
||||||
|
return FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
|
||||||
|
fpt sens = linear_base_fn(input_speed, args.accel, args.offset);
|
||||||
|
dbg("linear: base_fn sens %s", fptoa(args.accel));
|
||||||
|
|
||||||
|
fpt sign = FIXEDPT_ONE;
|
||||||
|
if (args.output_cap > 0) {
|
||||||
|
fpt cap = fpt_sub(args.output_cap, FIXEDPT_ONE);
|
||||||
|
if (cap < 0) {
|
||||||
|
cap = -cap;
|
||||||
|
sign = -sign;
|
||||||
|
}
|
||||||
|
sens = minsd(sens, cap);
|
||||||
|
}
|
||||||
|
|
||||||
|
return fpt_add(FIXEDPT_ONE, fpt_mul(sign, sens));
|
||||||
|
}
|
||||||
|
#endif // !__ACCEL_LINEAR_H_
|
||||||
@@ -0,0 +1,6 @@
|
|||||||
|
#ifndef __ACCEL_MODE_H
|
||||||
|
#define __ACCEL_MODE_H
|
||||||
|
|
||||||
|
enum accel_mode : unsigned char { linear, natural, synchronous, no_accel };
|
||||||
|
|
||||||
|
#endif // !__ACCEL_MODE_H
|
||||||
@@ -0,0 +1,48 @@
|
|||||||
|
#ifndef __ACCEL_NATURAL_H_
|
||||||
|
#define __ACCEL_NATURAL_H_
|
||||||
|
|
||||||
|
#include "../fixedptc.h"
|
||||||
|
|
||||||
|
struct natural_curve_args {
|
||||||
|
fpt decay_rate;
|
||||||
|
fpt offset;
|
||||||
|
fpt limit;
|
||||||
|
};
|
||||||
|
|
||||||
|
/**
|
||||||
|
* Gain Function for Natural Acceleration
|
||||||
|
*/
|
||||||
|
static inline fpt __natural_sens_fun(fpt input_speed,
|
||||||
|
struct natural_curve_args args) {
|
||||||
|
dbg("natural: decay_rate %s", fptoa(args.decay_rate));
|
||||||
|
dbg("natural: offset %s", fptoa(args.offset));
|
||||||
|
dbg("natural: limit %s", fptoa(args.limit));
|
||||||
|
if (input_speed <= args.offset) {
|
||||||
|
return FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
|
||||||
|
if (args.limit <= FIXEDPT_ONE) {
|
||||||
|
return FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
|
||||||
|
if (args.decay_rate <= 0) {
|
||||||
|
return FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
|
||||||
|
fpt limit = args.limit - FIXEDPT_ONE;
|
||||||
|
fpt accel = fpt_div(args.decay_rate, fpt_abs(limit));
|
||||||
|
fpt constant = fpt_div(-limit, accel);
|
||||||
|
|
||||||
|
dbg("natural: constant %s", fptoa(constant));
|
||||||
|
|
||||||
|
fpt offset_x = args.offset - input_speed;
|
||||||
|
fpt decay = fpt_exp(fpt_mul(accel, offset_x));
|
||||||
|
|
||||||
|
dbg("natural: decay %s", fptoa(decay));
|
||||||
|
|
||||||
|
fpt output_denom = fpt_div(decay, accel) - offset_x;
|
||||||
|
fpt output = fpt_mul(limit, output_denom) + constant;
|
||||||
|
|
||||||
|
return fpt_div(output, input_speed) + FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
#endif
|
||||||
@@ -0,0 +1,64 @@
|
|||||||
|
#ifndef __ACCEL_SYNCHRONOUS_H_
|
||||||
|
#define __ACCEL_SYNCHRONOUS_H_
|
||||||
|
|
||||||
|
#include "../fixedptc.h"
|
||||||
|
|
||||||
|
struct synchronous_curve_args {
|
||||||
|
fpt gamma;
|
||||||
|
fpt smooth;
|
||||||
|
fpt motivity;
|
||||||
|
fpt sync_speed;
|
||||||
|
};
|
||||||
|
|
||||||
|
/**
|
||||||
|
* Sensitivity Function for `Synchronous` Acceleration
|
||||||
|
*/
|
||||||
|
static inline fpt __synchronous_sens_fun(fpt input_speed,
|
||||||
|
struct synchronous_curve_args args) {
|
||||||
|
fpt log_motivity = fpt_ln(args.motivity);
|
||||||
|
fpt gamma_const = fpt_div(args.gamma, log_motivity);
|
||||||
|
fpt log_syncspeed = fpt_ln(args.sync_speed);
|
||||||
|
fpt syncspeed = args.sync_speed;
|
||||||
|
fpt sharpness = args.smooth == 0 ? fpt_rconst(16.0)
|
||||||
|
: fpt_div(fpt_rconst(0.5), args.smooth);
|
||||||
|
int use_linear_clamp = sharpness >= fpt_rconst(16.0);
|
||||||
|
fpt sharpness_recip = fpt_div(FIXEDPT_ONE, sharpness);
|
||||||
|
fpt minimum_sens = fpt_div(FIXEDPT_ONE, args.motivity);
|
||||||
|
fpt maximum_sens = args.motivity;
|
||||||
|
|
||||||
|
// if sharpness >= 16, use linear clamp for activation function.
|
||||||
|
// linear clamp means: fpt_clamp(input_speed, -1, 1).
|
||||||
|
if (use_linear_clamp) {
|
||||||
|
fpt log_space = fpt_mul(gamma_const, (fpt_ln(input_speed) - log_syncspeed));
|
||||||
|
|
||||||
|
if (log_space < -FIXEDPT_ONE) {
|
||||||
|
return minimum_sens;
|
||||||
|
}
|
||||||
|
|
||||||
|
if (log_space > FIXEDPT_ONE) {
|
||||||
|
return maximum_sens;
|
||||||
|
}
|
||||||
|
|
||||||
|
return fpt_exp(fpt_mul(log_space, log_motivity));
|
||||||
|
}
|
||||||
|
|
||||||
|
if (input_speed == syncspeed) {
|
||||||
|
return FIXEDPT_ONE;
|
||||||
|
}
|
||||||
|
|
||||||
|
fpt log_x = fpt_ln(input_speed);
|
||||||
|
fpt log_diff = log_x - log_syncspeed;
|
||||||
|
|
||||||
|
if (log_diff > 0) {
|
||||||
|
fpt log_space = fpt_mul(gamma_const, log_diff);
|
||||||
|
fpt exponent =
|
||||||
|
fpt_pow(fpt_tanh(fpt_pow(log_space, sharpness)), sharpness_recip);
|
||||||
|
return fpt_exp(fpt_mul(exponent, log_motivity));
|
||||||
|
} else {
|
||||||
|
fpt log_space = fpt_mul(-gamma_const, log_diff);
|
||||||
|
fpt exponent =
|
||||||
|
-fpt_pow(fpt_tanh(fpt_pow(log_space, sharpness)), sharpness_recip);
|
||||||
|
return fpt_exp(fpt_mul(exponent, log_motivity));
|
||||||
|
}
|
||||||
|
}
|
||||||
|
#endif
|
||||||
@@ -0,0 +1,87 @@
|
|||||||
|
#ifndef _ACCELK_H_
|
||||||
|
#define _ACCELK_H_
|
||||||
|
|
||||||
|
#include "accel.h"
|
||||||
|
#include "accel/linear.h"
|
||||||
|
#include "accel/mode.h"
|
||||||
|
#include "fixedptc.h"
|
||||||
|
#include "linux/ktime.h"
|
||||||
|
#include "params.h"
|
||||||
|
#include "speed.h"
|
||||||
|
|
||||||
|
static struct accel_args collect_args(void) {
|
||||||
|
struct accel_args accel = {0};
|
||||||
|
|
||||||
|
enum accel_mode mode = PARAM_MODE;
|
||||||
|
accel.tag = mode;
|
||||||
|
|
||||||
|
accel.sens_mult = atofp(PARAM_SENS_MULT);
|
||||||
|
accel.yx_ratio = atofp(PARAM_YX_RATIO);
|
||||||
|
accel.input_dpi = atofp(PARAM_INPUT_DPI);
|
||||||
|
accel.angle_rotation_deg = atofp(PARAM_ANGLE_ROTATION);
|
||||||
|
|
||||||
|
switch (mode) {
|
||||||
|
case synchronous: {
|
||||||
|
accel.args.synchronous.gamma = atofp(PARAM_GAMMA);
|
||||||
|
accel.args.synchronous.smooth = atofp(PARAM_SMOOTH);
|
||||||
|
accel.args.synchronous.motivity = atofp(PARAM_MOTIVITY);
|
||||||
|
accel.args.synchronous.sync_speed = atofp(PARAM_SYNC_SPEED);
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
case natural: {
|
||||||
|
accel.args.natural.decay_rate = atofp(PARAM_DECAY_RATE);
|
||||||
|
accel.args.natural.offset = atofp(PARAM_OFFSET);
|
||||||
|
accel.args.natural.limit = atofp(PARAM_LIMIT);
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
case linear: {
|
||||||
|
accel.args.linear.accel = atofp(PARAM_ACCEL);
|
||||||
|
accel.args.linear.offset = atofp(PARAM_OFFSET);
|
||||||
|
accel.args.linear.output_cap = atofp(PARAM_OUTPUT_CAP);
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
case no_accel:
|
||||||
|
default: {
|
||||||
|
}
|
||||||
|
};
|
||||||
|
return accel;
|
||||||
|
}
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
const fpt UNIT_PER_MS = fpt_rconst(1000000); // 1 million nanoseconds
|
||||||
|
#else
|
||||||
|
const fpt UNIT_PER_MS = fpt_rconst(1000); // 1 thousand microsends
|
||||||
|
#endif
|
||||||
|
|
||||||
|
static inline void accelerate(int *x, int *y) {
|
||||||
|
dbg("FIXEDPT_BITS = %d", FIXEDPT_BITS);
|
||||||
|
|
||||||
|
static ktime_t last_time;
|
||||||
|
ktime_t now = ktime_get();
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
s64 unit_time = ktime_to_ns(now - last_time);
|
||||||
|
dbg("ktime interval -> now (%llu) vs last_ktime (%llu), diff = %llins", now,
|
||||||
|
last_time, unit_time);
|
||||||
|
#else
|
||||||
|
s64 unit_time = ktime_to_us(now - last_time);
|
||||||
|
dbg("ktime interval -> now (%llu) vs last_ktime (%llu), diff = %llius", now,
|
||||||
|
last_time, unit_time);
|
||||||
|
#endif
|
||||||
|
last_time = now;
|
||||||
|
|
||||||
|
fpt _unit_time = fpt_fromint(unit_time);
|
||||||
|
fpt millisecond = fpt_div(_unit_time, UNIT_PER_MS);
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
dbg("ktime interval -> converting to ns: %lluns -> %sms", unit_time,
|
||||||
|
fptoa(millisecond));
|
||||||
|
#else
|
||||||
|
dbg("ktime interval, converting to us: %lluus -> %sms", unit_time,
|
||||||
|
fptoa(millisecond));
|
||||||
|
#endif
|
||||||
|
|
||||||
|
return f_accelerate(x, y, millisecond, collect_args());
|
||||||
|
}
|
||||||
|
|
||||||
|
#endif // !_ACCELK_H_
|
||||||
@@ -0,0 +1,6 @@
|
|||||||
|
#include "accel.h"
|
||||||
|
|
||||||
|
extern inline struct vector sensitivity_rs(fpt input_speed,
|
||||||
|
struct accel_args args) {
|
||||||
|
return sensitivity(input_speed, args);
|
||||||
|
}
|
||||||
@@ -0,0 +1,39 @@
|
|||||||
|
#ifdef DEBUG
|
||||||
|
#define DEBUG_TEST 1
|
||||||
|
#else
|
||||||
|
#define DEBUG_TEST 0
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#ifdef __KERNEL__
|
||||||
|
#include <linux/printk.h>
|
||||||
|
#define dbg(fmt, ...) dbg_k(fmt, __VA_ARGS__)
|
||||||
|
#else
|
||||||
|
#include <stdio.h>
|
||||||
|
#define dbg(fmt, ...) dbg_std(fmt, __VA_ARGS__)
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#if defined __KERNEL__ && defined __clang__
|
||||||
|
#define dbg_k(fmt, ...) \
|
||||||
|
_Pragma("clang diagnostic push") \
|
||||||
|
_Pragma("clang diagnostic ignored \"-Wstatic-local-in-inline\"") do { \
|
||||||
|
if (DEBUG_TEST) \
|
||||||
|
printk(KERN_INFO "%s:%d:%s(): " #fmt "\n", __FILE__, __LINE__, __func__, \
|
||||||
|
__VA_ARGS__); \
|
||||||
|
} \
|
||||||
|
while (0) \
|
||||||
|
_Pragma("clang diagnostic pop")
|
||||||
|
#elif defined __KERNEL__
|
||||||
|
#define dbg_k(fmt, ...) \
|
||||||
|
do { \
|
||||||
|
if (DEBUG_TEST) \
|
||||||
|
printk(KERN_INFO "%s:%d:%s(): " #fmt "\n", __FILE__, __LINE__, __func__, \
|
||||||
|
__VA_ARGS__); \
|
||||||
|
} while (0)
|
||||||
|
#else
|
||||||
|
#define dbg_std(fmt, ...) \
|
||||||
|
do { \
|
||||||
|
if (DEBUG_TEST) \
|
||||||
|
fprintf(stderr, "%s:%d:%s(): " fmt "\n", __FILE__, __LINE__, __func__, \
|
||||||
|
__VA_ARGS__); \
|
||||||
|
} while (0)
|
||||||
|
#endif
|
||||||
@@ -0,0 +1,437 @@
|
|||||||
|
#ifndef _FIXEDPTC_H_
|
||||||
|
#define _FIXEDPTC_H_
|
||||||
|
|
||||||
|
/*
|
||||||
|
* fixedptc.h is a 32-bit or 64-bit fixed point numeric library.
|
||||||
|
*
|
||||||
|
* The symbol FIXEDPT_BITS, if defined before this library header file
|
||||||
|
* is included, determines the number of bits in the data type (its "width").
|
||||||
|
* The default width is 32-bit (FIXEDPT_BITS=32) and it can be used
|
||||||
|
* on any recent C99 compiler. The 64-bit precision (FIXEDPT_BITS=64) is
|
||||||
|
* available on compilers which implement 128-bit "long long" types. This
|
||||||
|
* precision has been tested on GCC 4.2+.
|
||||||
|
*
|
||||||
|
* The FIXEDPT_WBITS symbols governs how many bits are dedicated to the
|
||||||
|
* "whole" part of the number (to the left of the decimal point). The larger
|
||||||
|
* this width is, the larger the numbers which can be stored in the fixedpt
|
||||||
|
* number. The rest of the bits (available in the FIXEDPT_FBITS symbol) are
|
||||||
|
* dedicated to the fraction part of the number (to the right of the decimal
|
||||||
|
* point).
|
||||||
|
*
|
||||||
|
* Since the number of bits in both cases is relatively low, many complex
|
||||||
|
* functions (more complex than div & mul) take a large hit on the precision
|
||||||
|
* of the end result because errors in precision accumulate.
|
||||||
|
* This loss of precision can be lessened by increasing the number of
|
||||||
|
* bits dedicated to the fraction part, but at the loss of range.
|
||||||
|
*
|
||||||
|
* Adventurous users might utilize this library to build two data types:
|
||||||
|
* one which has the range, and one which has the precision, and carefully
|
||||||
|
* convert between them (including adding two number of each type to produce
|
||||||
|
* a simulated type with a larger range and precision).
|
||||||
|
*
|
||||||
|
* The ideas and algorithms have been cherry-picked from a large number
|
||||||
|
* of previous implementations available on the Internet.
|
||||||
|
* Tim Hartrick has contributed cleanup and 64-bit support patches.
|
||||||
|
*
|
||||||
|
* == Special notes for the 32-bit precision ==
|
||||||
|
* Signed 32-bit fixed point numeric library for the 24.8 format.
|
||||||
|
* The specific limits are -8388608.999... to 8388607.999... and the
|
||||||
|
* most precise number is 0.00390625. In practice, you should not count
|
||||||
|
* on working with numbers larger than a million or to the precision
|
||||||
|
* of more than 2 decimal places. Make peace with the fact that PI
|
||||||
|
* is 3.14 here. :)
|
||||||
|
*/
|
||||||
|
|
||||||
|
/*-
|
||||||
|
* Copyright (c) 2010-2012 Ivan Voras <ivoras@freebsd.org>
|
||||||
|
* Copyright (c) 2012 Tim Hartrick <tim@edgecast.com>
|
||||||
|
*
|
||||||
|
* Redistribution and use in source and binary forms, with or without
|
||||||
|
* modification, are permitted provided that the following conditions
|
||||||
|
* are met:
|
||||||
|
* 1. Redistributions of source code must retain the above copyright
|
||||||
|
* notice, this list of conditions and the following disclaimer.
|
||||||
|
* 2. Redistributions in binary form must reproduce the above copyright
|
||||||
|
* notice, this list of conditions and the following disclaimer in the
|
||||||
|
* documentation and/or other materials provided with the distribution.
|
||||||
|
*
|
||||||
|
* THIS SOFTWARE IS PROVIDED BY THE AUTHOR AND CONTRIBUTORS ``AS IS'' AND
|
||||||
|
* ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
|
||||||
|
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
|
||||||
|
* ARE DISCLAIMED. IN NO EVENT SHALL THE AUTHOR OR CONTRIBUTORS BE LIABLE
|
||||||
|
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
|
||||||
|
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS
|
||||||
|
* OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
|
||||||
|
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
|
||||||
|
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY
|
||||||
|
* OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF
|
||||||
|
* SUCH DAMAGE.
|
||||||
|
*/
|
||||||
|
|
||||||
|
#include "utils.h"
|
||||||
|
|
||||||
|
#ifndef FIXEDPT_BITS
|
||||||
|
#define FIXEDPT_BITS 64
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#ifdef __KERNEL__
|
||||||
|
#include <linux/math64.h>
|
||||||
|
#include <linux/stddef.h>
|
||||||
|
#include <linux/types.h>
|
||||||
|
#else
|
||||||
|
#include <stddef.h>
|
||||||
|
#include <stdint.h>
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 32
|
||||||
|
typedef int32_t fpt;
|
||||||
|
typedef int64_t fptd;
|
||||||
|
typedef uint32_t fptu;
|
||||||
|
typedef uint64_t fptud;
|
||||||
|
|
||||||
|
#define FIXEDPT_WBITS 16
|
||||||
|
|
||||||
|
#elif FIXEDPT_BITS == 64
|
||||||
|
#include "Fixed64.utils.h"
|
||||||
|
|
||||||
|
typedef int64_t fpt;
|
||||||
|
typedef __int128_t fptd;
|
||||||
|
typedef uint64_t fptu;
|
||||||
|
typedef __uint128_t fptud;
|
||||||
|
|
||||||
|
#define FIXEDPT_WBITS 32
|
||||||
|
#else
|
||||||
|
#error "FIXEDPT_BITS must be equal to 32 or 64"
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#if FIXEDPT_WBITS >= FIXEDPT_BITS
|
||||||
|
#error "FIXEDPT_WBITS must be less than or equal to FIXEDPT_BITS"
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#define FIXEDPT_VCSID "$Id$"
|
||||||
|
|
||||||
|
#define FIXEDPT_FBITS (FIXEDPT_BITS - FIXEDPT_WBITS)
|
||||||
|
#define FIXEDPT_FMASK (((fpt)1 << FIXEDPT_FBITS) - 1)
|
||||||
|
|
||||||
|
#define fpt_rconst(R) ((fpt)((R) * FIXEDPT_ONE + ((R) >= 0 ? 0.5 : -0.5)))
|
||||||
|
#define fpt_fromint(I) ((fptd)(I) << FIXEDPT_FBITS)
|
||||||
|
#define fpt_toint(F) ((F) >> FIXEDPT_FBITS)
|
||||||
|
#define fpt_add(A, B) ((A) + (B))
|
||||||
|
#define fpt_sub(A, B) ((A) - (B))
|
||||||
|
#define fpt_xmul(A, B) ((fpt)(((fptd)(A) * (fptd)(B)) >> FIXEDPT_FBITS))
|
||||||
|
#define fpt_xdiv(A, B) ((fpt)(((fptd)(A) << FIXEDPT_FBITS) / (fptd)(B)))
|
||||||
|
#define fpt_fracpart(A) ((fpt)(A) & FIXEDPT_FMASK)
|
||||||
|
|
||||||
|
#define FIXEDPT_ONE ((fpt)((fpt)1 << FIXEDPT_FBITS))
|
||||||
|
#define FIXEDPT_ONE_HALF (FIXEDPT_ONE >> 1)
|
||||||
|
#define FIXEDPT_TWO (FIXEDPT_ONE + FIXEDPT_ONE)
|
||||||
|
#define FIXEDPT_PI fpt_rconst(3.14159265358979323846)
|
||||||
|
#define FIXEDPT_TWO_PI fpt_rconst(2 * 3.14159265358979323846)
|
||||||
|
#define FIXEDPT_HALF_PI fpt_rconst(3.14159265358979323846 / 2)
|
||||||
|
#define FIXEDPT_E fpt_rconst(2.7182818284590452354)
|
||||||
|
|
||||||
|
#define fpt_abs(A) ((A) < 0 ? -(A) : (A))
|
||||||
|
|
||||||
|
/* fpt is meant to be usable in environments without floating point support
|
||||||
|
* (e.g. microcontrollers, kernels), so we can't use floating point types
|
||||||
|
* directly. Putting them only in macros will effectively make them optional. */
|
||||||
|
#define fpt_tofloat(T) \
|
||||||
|
((float)((T) * ((float)(1) / (float)(1L << FIXEDPT_FBITS))))
|
||||||
|
|
||||||
|
#define fpt_todouble(T) \
|
||||||
|
((double)((T) * ((double)(1) / (double)(1L << FIXEDPT_FBITS))))
|
||||||
|
|
||||||
|
/* Multiplies two fpt numbers, returns the result. */
|
||||||
|
static inline fpt fpt_mul(fpt A, fpt B) {
|
||||||
|
return (((fptd)A * (fptd)B) >> FIXEDPT_FBITS);
|
||||||
|
}
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
static inline fpt div128_s64_s64(fpt dividend, fpt divisor) {
|
||||||
|
fpt high = dividend >> FIXEDPT_FBITS;
|
||||||
|
fpt low = dividend << FIXEDPT_FBITS;
|
||||||
|
|
||||||
|
fpt result = div128_s64_s64_s64(high, low, divisor);
|
||||||
|
return result;
|
||||||
|
}
|
||||||
|
#endif
|
||||||
|
|
||||||
|
/* Divides two fpt numbers, returns the result. */
|
||||||
|
static inline fpt fpt_div(fpt A, fpt B) {
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
return div128_s64_s64(A, B);
|
||||||
|
#endif
|
||||||
|
return (((fptd)A << FIXEDPT_FBITS) / (fptd)B);
|
||||||
|
}
|
||||||
|
|
||||||
|
/*
|
||||||
|
* Note: adding and subtracting fpt numbers can be done by using
|
||||||
|
* the regular integer operators + and -.
|
||||||
|
*/
|
||||||
|
|
||||||
|
/**
|
||||||
|
* Convert the given fpt number to a decimal string.
|
||||||
|
* The max_dec argument specifies how many decimal digits to the right
|
||||||
|
* of the decimal point to generate. If set to -1, the "default" number
|
||||||
|
* of decimal digits will be used (2 for 32-bit fpt width, 10 for
|
||||||
|
* 64-bit fpt width); If set to -2, "all" of the digits will
|
||||||
|
* be returned, meaning there will be invalid, bogus digits outside the
|
||||||
|
* specified precisions.
|
||||||
|
*/
|
||||||
|
static inline void fpt_str(fpt A, char *str, int max_dec) {
|
||||||
|
int ndec = 0, slen = 0;
|
||||||
|
char tmp[12] = {0};
|
||||||
|
fptud fr, ip;
|
||||||
|
const fptud one = (fptud)1 << FIXEDPT_BITS;
|
||||||
|
const fptud mask = one - 1;
|
||||||
|
|
||||||
|
if (max_dec == -1)
|
||||||
|
#if FIXEDPT_BITS == 32
|
||||||
|
#if FIXEDPT_WBITS > 16
|
||||||
|
max_dec = 2;
|
||||||
|
#else
|
||||||
|
max_dec = 4;
|
||||||
|
#endif
|
||||||
|
#elif FIXEDPT_BITS == 64
|
||||||
|
max_dec = 10;
|
||||||
|
#else
|
||||||
|
#error Invalid width
|
||||||
|
#endif
|
||||||
|
else if (max_dec == -2)
|
||||||
|
max_dec = 15;
|
||||||
|
|
||||||
|
if (A < 0) {
|
||||||
|
str[slen++] = '-';
|
||||||
|
A *= -1;
|
||||||
|
}
|
||||||
|
|
||||||
|
ip = fpt_toint(A);
|
||||||
|
do {
|
||||||
|
tmp[ndec++] = '0' + ip % 10;
|
||||||
|
ip /= 10;
|
||||||
|
} while (ip != 0);
|
||||||
|
|
||||||
|
while (ndec > 0)
|
||||||
|
str[slen++] = tmp[--ndec];
|
||||||
|
str[slen++] = '.';
|
||||||
|
|
||||||
|
fr = (fpt_fracpart(A) << FIXEDPT_WBITS) & mask;
|
||||||
|
do {
|
||||||
|
fr = (fr & mask) * 10;
|
||||||
|
|
||||||
|
str[slen++] = '0' + (fr >> FIXEDPT_BITS) % 10;
|
||||||
|
ndec++;
|
||||||
|
} while (fr != 0 && ndec < max_dec);
|
||||||
|
|
||||||
|
if (ndec > 1 && str[slen - 1] == '0')
|
||||||
|
str[slen - 1] = '\0'; /* cut off trailing 0 */
|
||||||
|
else
|
||||||
|
str[slen] = '\0';
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Converts the given fpt number into a string, using a static
|
||||||
|
* (non-threadsafe) string buffer */
|
||||||
|
static inline char *fptoa(const fpt A) {
|
||||||
|
static char str[25];
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
FP64_ToString(A, str);
|
||||||
|
#else
|
||||||
|
fpt_str(A, str, 10);
|
||||||
|
#endif
|
||||||
|
return (str);
|
||||||
|
}
|
||||||
|
|
||||||
|
static fpt atofp(char *num_string) {
|
||||||
|
fptu n = 0;
|
||||||
|
int sign = 0;
|
||||||
|
|
||||||
|
for (int idx = 0; num_string[idx] != '\0'; idx++) {
|
||||||
|
char c = num_string[idx];
|
||||||
|
switch (c) {
|
||||||
|
case ' ':
|
||||||
|
continue;
|
||||||
|
case '\n':
|
||||||
|
continue;
|
||||||
|
case '-':
|
||||||
|
sign = 1;
|
||||||
|
continue;
|
||||||
|
default:
|
||||||
|
if (is_digit(c)) {
|
||||||
|
int digit = c - '0';
|
||||||
|
n = n * 10 + digit;
|
||||||
|
} else {
|
||||||
|
dbg("Hit an unsupported character while parsing a number: '%c'", c);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
return sign ? -n : n;
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Returns the square root of the given number, or -1 in case of error */
|
||||||
|
static inline fpt fpt_sqrt(fpt A) {
|
||||||
|
int invert = 0;
|
||||||
|
int iter = FIXEDPT_FBITS;
|
||||||
|
int i;
|
||||||
|
fpt l;
|
||||||
|
|
||||||
|
if (A < 0)
|
||||||
|
return (-1);
|
||||||
|
if (A == 0 || A == FIXEDPT_ONE)
|
||||||
|
return (A);
|
||||||
|
if (A < FIXEDPT_ONE && A > 6) {
|
||||||
|
invert = 1;
|
||||||
|
A = fpt_div(FIXEDPT_ONE, A);
|
||||||
|
}
|
||||||
|
if (A > FIXEDPT_ONE) {
|
||||||
|
fpt s = A;
|
||||||
|
|
||||||
|
iter = 0;
|
||||||
|
while (s > 0) {
|
||||||
|
s >>= 2;
|
||||||
|
iter++;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Newton's iterations */
|
||||||
|
l = (A >> 1) + 1;
|
||||||
|
for (i = 0; i < iter; i++)
|
||||||
|
l = (l + fpt_div(A, l)) >> 1;
|
||||||
|
if (invert)
|
||||||
|
return (fpt_div(FIXEDPT_ONE, l));
|
||||||
|
return (l);
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Returns the sine of the given fpt number.
|
||||||
|
* Note: the loss of precision is extraordinary! */
|
||||||
|
static inline fpt fpt_sin(fpt fp) {
|
||||||
|
int sign = 1;
|
||||||
|
fpt sqr, result;
|
||||||
|
const fpt SK[2] = {fpt_rconst(7.61e-03), fpt_rconst(1.6605e-01)};
|
||||||
|
|
||||||
|
fp %= 2 * FIXEDPT_PI;
|
||||||
|
if (fp < 0)
|
||||||
|
fp = FIXEDPT_PI * 2 + fp;
|
||||||
|
if ((fp > FIXEDPT_HALF_PI) && (fp <= FIXEDPT_PI))
|
||||||
|
fp = FIXEDPT_PI - fp;
|
||||||
|
else if ((fp > FIXEDPT_PI) && (fp <= (FIXEDPT_PI + FIXEDPT_HALF_PI))) {
|
||||||
|
fp = fp - FIXEDPT_PI;
|
||||||
|
sign = -1;
|
||||||
|
} else if (fp > (FIXEDPT_PI + FIXEDPT_HALF_PI)) {
|
||||||
|
fp = (FIXEDPT_PI << 1) - fp;
|
||||||
|
sign = -1;
|
||||||
|
}
|
||||||
|
sqr = fpt_mul(fp, fp);
|
||||||
|
result = SK[0];
|
||||||
|
result = fpt_mul(result, sqr);
|
||||||
|
result -= SK[1];
|
||||||
|
result = fpt_mul(result, sqr);
|
||||||
|
result += FIXEDPT_ONE;
|
||||||
|
result = fpt_mul(result, fp);
|
||||||
|
return sign * result;
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Returns the cosine of the given fpt number */
|
||||||
|
static inline fpt fpt_cos(fpt A) { return (fpt_sin(FIXEDPT_HALF_PI - A)); }
|
||||||
|
|
||||||
|
/* Returns the tangent of the given fpt number */
|
||||||
|
static inline fpt fpt_tan(fpt A) { return fpt_div(fpt_sin(A), fpt_cos(A)); }
|
||||||
|
|
||||||
|
/* Returns the value exp(x), i.e. e^x of the given fpt number. */
|
||||||
|
static inline fpt fpt_exp(fpt fp) {
|
||||||
|
fpt xabs, k, z, R, xp;
|
||||||
|
const fpt LN2 = fpt_rconst(0.69314718055994530942);
|
||||||
|
const fpt LN2_INV = fpt_rconst(1.4426950408889634074);
|
||||||
|
const fpt EXP_P[5] = {
|
||||||
|
fpt_rconst(1.66666666666666019037e-01),
|
||||||
|
fpt_rconst(-2.77777777770155933842e-03),
|
||||||
|
fpt_rconst(6.61375632143793436117e-05),
|
||||||
|
fpt_rconst(-1.65339022054652515390e-06),
|
||||||
|
fpt_rconst(4.13813679705723846039e-08),
|
||||||
|
};
|
||||||
|
|
||||||
|
if (fp == 0)
|
||||||
|
return (FIXEDPT_ONE);
|
||||||
|
xabs = fpt_abs(fp);
|
||||||
|
k = fpt_mul(xabs, LN2_INV);
|
||||||
|
k += FIXEDPT_ONE_HALF;
|
||||||
|
k &= ~FIXEDPT_FMASK;
|
||||||
|
if (fp < 0)
|
||||||
|
k = -k;
|
||||||
|
fp -= fpt_mul(k, LN2);
|
||||||
|
z = fpt_mul(fp, fp);
|
||||||
|
/* Taylor */
|
||||||
|
R = FIXEDPT_TWO +
|
||||||
|
fpt_mul(
|
||||||
|
z,
|
||||||
|
EXP_P[0] +
|
||||||
|
fpt_mul(
|
||||||
|
z, EXP_P[1] +
|
||||||
|
fpt_mul(z, EXP_P[2] +
|
||||||
|
fpt_mul(z, EXP_P[3] +
|
||||||
|
fpt_mul(z, EXP_P[4])))));
|
||||||
|
xp = FIXEDPT_ONE + fpt_div(fpt_mul(fp, FIXEDPT_TWO), R - fp);
|
||||||
|
if (k < 0)
|
||||||
|
k = FIXEDPT_ONE >> (-k >> FIXEDPT_FBITS);
|
||||||
|
else
|
||||||
|
k = FIXEDPT_ONE << (k >> FIXEDPT_FBITS);
|
||||||
|
return (fpt_mul(k, xp));
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Returns the hyperbolic tangent of the given fpt number */
|
||||||
|
static inline fpt fpt_tanh(fpt X) {
|
||||||
|
fpt e_to_the_2_x = fpt_exp(fpt_mul(FIXEDPT_TWO, X));
|
||||||
|
fpt sinh = e_to_the_2_x - FIXEDPT_ONE;
|
||||||
|
fpt cosh = e_to_the_2_x + FIXEDPT_ONE;
|
||||||
|
return fpt_div(sinh, cosh);
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Returns the natural logarithm of the given fpt number. */
|
||||||
|
static inline fpt fpt_ln(fpt x) {
|
||||||
|
fpt log2, xi;
|
||||||
|
fpt f, s, z, w, R;
|
||||||
|
const fpt LN2 = fpt_rconst(0.69314718055994530942);
|
||||||
|
const fpt LG[7] = {fpt_rconst(6.666666666666735130e-01),
|
||||||
|
fpt_rconst(3.999999999940941908e-01),
|
||||||
|
fpt_rconst(2.857142874366239149e-01),
|
||||||
|
fpt_rconst(2.222219843214978396e-01),
|
||||||
|
fpt_rconst(1.818357216161805012e-01),
|
||||||
|
fpt_rconst(1.531383769920937332e-01),
|
||||||
|
fpt_rconst(1.479819860511658591e-01)};
|
||||||
|
|
||||||
|
if (x < 0)
|
||||||
|
return (0);
|
||||||
|
if (x == 0)
|
||||||
|
return 0xffffffff;
|
||||||
|
|
||||||
|
log2 = 0;
|
||||||
|
xi = x;
|
||||||
|
while (xi > FIXEDPT_TWO) {
|
||||||
|
xi >>= 1;
|
||||||
|
log2++;
|
||||||
|
}
|
||||||
|
f = xi - FIXEDPT_ONE;
|
||||||
|
s = fpt_div(f, FIXEDPT_TWO + f);
|
||||||
|
z = fpt_mul(s, s);
|
||||||
|
w = fpt_mul(z, z);
|
||||||
|
R = fpt_mul(w, LG[1] + fpt_mul(w, LG[3] + fpt_mul(w, LG[5]))) +
|
||||||
|
fpt_mul(z, LG[0] +
|
||||||
|
fpt_mul(w, LG[2] + fpt_mul(w, LG[4] + fpt_mul(w, LG[6]))));
|
||||||
|
return (fpt_mul(LN2, (log2 << FIXEDPT_FBITS)) + f - fpt_mul(s, f - R));
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Returns the logarithm of the given base of the given fpt number */
|
||||||
|
static inline fpt fpt_log(fpt x, fpt base) {
|
||||||
|
return (fpt_div(fpt_ln(x), fpt_ln(base)));
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Return the power value (n^exp) of the given fpt numbers */
|
||||||
|
static inline fpt fpt_pow(fpt n, fpt exp) {
|
||||||
|
if (exp == 0)
|
||||||
|
return (FIXEDPT_ONE);
|
||||||
|
if (n < 0)
|
||||||
|
return 0;
|
||||||
|
return (fpt_exp(fpt_mul(fpt_ln(n), exp)));
|
||||||
|
}
|
||||||
|
|
||||||
|
#endif
|
||||||
@@ -0,0 +1,93 @@
|
|||||||
|
#ifndef _INPUT_ECHO_
|
||||||
|
#define _INPUT_ECHO_
|
||||||
|
|
||||||
|
#include "fixedptc.h"
|
||||||
|
#include "linux/cdev.h"
|
||||||
|
#include "linux/fs.h"
|
||||||
|
#include "speed.h"
|
||||||
|
#include <linux/version.h>
|
||||||
|
|
||||||
|
int create_char_device(void);
|
||||||
|
void destroy_char_device(void);
|
||||||
|
|
||||||
|
static struct cdev device;
|
||||||
|
static struct class *device_class;
|
||||||
|
static dev_t device_number;
|
||||||
|
|
||||||
|
/*
|
||||||
|
* Convert an int into an array of four/eight bytes, in big endian (MSB first)
|
||||||
|
*/
|
||||||
|
static void fpt_to_int_be_bytes(fpt num, char bytes[sizeof(fpt)]) {
|
||||||
|
#define byte(i) (FIXEDPT_BITS - (i * 8))
|
||||||
|
bytes[0] = (num >> byte(1)) & 0xFF; // Most significant byte
|
||||||
|
bytes[1] = (num >> byte(2)) & 0xFF;
|
||||||
|
bytes[2] = (num >> byte(3)) & 0xFF;
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
if (sizeof(fpt) == 8) {
|
||||||
|
bytes[3] = (num >> byte(4)) & 0xFF;
|
||||||
|
bytes[4] = (num >> byte(5)) & 0xFF;
|
||||||
|
bytes[5] = (num >> byte(6)) & 0xFF;
|
||||||
|
bytes[6] = (num >> byte(7)) & 0xFF;
|
||||||
|
bytes[7] = num & 0xFF; // Least significant byte
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
#else
|
||||||
|
bytes[3] = num & 0xFF; // Least significant byte
|
||||||
|
#endif
|
||||||
|
}
|
||||||
|
|
||||||
|
static ssize_t read(struct file *f, char __user *user_buffer, size_t size,
|
||||||
|
loff_t *offset) {
|
||||||
|
dbg("echoing speed to userspace: %s", fptoa(LAST_INPUT_MOUSE_SPEED));
|
||||||
|
|
||||||
|
char be_bytes_for_int[sizeof(fpt)] = {0};
|
||||||
|
fpt_to_int_be_bytes(LAST_INPUT_MOUSE_SPEED, be_bytes_for_int);
|
||||||
|
|
||||||
|
int err =
|
||||||
|
copy_to_user(user_buffer, be_bytes_for_int, sizeof(be_bytes_for_int));
|
||||||
|
if (err)
|
||||||
|
return -EFAULT;
|
||||||
|
|
||||||
|
return sizeof(be_bytes_for_int);
|
||||||
|
}
|
||||||
|
|
||||||
|
struct file_operations fops = {.owner = THIS_MODULE, .read = read};
|
||||||
|
|
||||||
|
int create_char_device(void) {
|
||||||
|
int err;
|
||||||
|
err = alloc_chrdev_region(&device_number, 0, 1, "maccel");
|
||||||
|
if (err)
|
||||||
|
return -EIO;
|
||||||
|
|
||||||
|
cdev_init(&device, &fops);
|
||||||
|
cdev_add(&device, device_number, 1);
|
||||||
|
|
||||||
|
#if (LINUX_VERSION_CODE < KERNEL_VERSION(6, 4, 0))
|
||||||
|
device_class = class_create(THIS_MODULE, "maccel");
|
||||||
|
#else
|
||||||
|
device.owner = THIS_MODULE;
|
||||||
|
device_class = class_create("maccel");
|
||||||
|
#endif
|
||||||
|
|
||||||
|
if (IS_ERR(device_class)) {
|
||||||
|
goto err_free_cdev;
|
||||||
|
}
|
||||||
|
|
||||||
|
device_create(device_class, NULL, device_number, NULL, "maccel");
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
|
||||||
|
err_free_cdev:
|
||||||
|
cdev_del(&device);
|
||||||
|
unregister_chrdev_region(device_number, 1);
|
||||||
|
return -EIO;
|
||||||
|
}
|
||||||
|
|
||||||
|
void destroy_char_device(void) {
|
||||||
|
device_destroy(device_class, device_number);
|
||||||
|
class_destroy(device_class);
|
||||||
|
cdev_del(&device);
|
||||||
|
unregister_chrdev_region(device_number, 1);
|
||||||
|
}
|
||||||
|
|
||||||
|
#endif // !_INPUT_ECHO_
|
||||||
@@ -0,0 +1,231 @@
|
|||||||
|
#include "./accel_k.h"
|
||||||
|
#include "linux/input.h"
|
||||||
|
#include "mouse_move.h"
|
||||||
|
#include <linux/hid.h>
|
||||||
|
#include <linux/version.h>
|
||||||
|
|
||||||
|
#if (LINUX_VERSION_CODE < KERNEL_VERSION(6, 11, 0))
|
||||||
|
#define __cleanup_events 0
|
||||||
|
#else
|
||||||
|
#define __cleanup_events 1
|
||||||
|
#endif
|
||||||
|
|
||||||
|
static inline bool rotation_is_enabled(void) {
|
||||||
|
/* Fast check: the default is "0", so skip atofp unless the string differs */
|
||||||
|
return PARAM_ANGLE_ROTATION[0] != '0' || PARAM_ANGLE_ROTATION[1] != '\0';
|
||||||
|
}
|
||||||
|
|
||||||
|
/*
|
||||||
|
* Collect the events EV_REL REL_X and EV_REL REL_Y, once we have both then
|
||||||
|
* we accelerate the (x, y) vector and set the EV_REL event's value
|
||||||
|
* through the `value_ptr` of each collected event.
|
||||||
|
*/
|
||||||
|
static void event(struct input_handle *handle, struct input_value *value_ptr) {
|
||||||
|
/* printk(KERN_INFO "type %d, code %d, value %d", type, code, value); */
|
||||||
|
|
||||||
|
switch (value_ptr->type) {
|
||||||
|
case EV_REL: {
|
||||||
|
dbg("EV_REL => code %d, value %d", value_ptr->code, value_ptr->value);
|
||||||
|
update_mouse_move(value_ptr);
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
case EV_SYN: {
|
||||||
|
int x = get_x(MOVEMENT);
|
||||||
|
int y = get_y(MOVEMENT);
|
||||||
|
if (x || y) {
|
||||||
|
dbg("EV_SYN => code %d", value_ptr->code);
|
||||||
|
|
||||||
|
/*
|
||||||
|
* When rotation is active and one axis is missing from this frame,
|
||||||
|
* point the missing axis to synthetic storage so f_accelerate can
|
||||||
|
* write the rotated cross-axis component into it. The synthetic
|
||||||
|
* value is later injected into the event stream by maccel_events().
|
||||||
|
*
|
||||||
|
* Only on >= 6.11.0: injection into the event buffer is not
|
||||||
|
* possible on older kernels, so there is no point in computing
|
||||||
|
* the cross-axis component.
|
||||||
|
*/
|
||||||
|
#if __cleanup_events
|
||||||
|
if (rotation_is_enabled()) {
|
||||||
|
ensure_axes_for_rotation();
|
||||||
|
}
|
||||||
|
#endif
|
||||||
|
|
||||||
|
accelerate(&x, &y);
|
||||||
|
dbg("accelerated -> (%d, %d)", x, y);
|
||||||
|
set_x_move(x);
|
||||||
|
set_y_move(y);
|
||||||
|
|
||||||
|
clear_mouse_move();
|
||||||
|
}
|
||||||
|
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
default:
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
#if __cleanup_events
|
||||||
|
static unsigned int maccel_events(struct input_handle *handle,
|
||||||
|
struct input_value *vals,
|
||||||
|
unsigned int count) {
|
||||||
|
#else
|
||||||
|
static void maccel_events(struct input_handle *handle,
|
||||||
|
const struct input_value *vals, unsigned int count) {
|
||||||
|
#endif
|
||||||
|
struct input_value *v;
|
||||||
|
for (v = vals; v != vals + count; v++) {
|
||||||
|
event(handle, v);
|
||||||
|
}
|
||||||
|
|
||||||
|
struct input_value *end = vals;
|
||||||
|
|
||||||
|
for (v = vals; v != vals + count; v++) {
|
||||||
|
if (v->type == EV_REL && v->value == NONE_EVENT_VALUE)
|
||||||
|
continue;
|
||||||
|
if (end != v) {
|
||||||
|
*end = *v;
|
||||||
|
}
|
||||||
|
end++;
|
||||||
|
}
|
||||||
|
|
||||||
|
int _count = end - vals;
|
||||||
|
|
||||||
|
#if __cleanup_events
|
||||||
|
/*
|
||||||
|
* Inject synthetic EV_REL events for axes that rotation produced
|
||||||
|
* but weren't present in the original frame. Insert before SYN_REPORT
|
||||||
|
* so downstream handlers see a valid event sequence.
|
||||||
|
*
|
||||||
|
* Gated to >= 6.11.0 only: on older kernels the handler returns void
|
||||||
|
* and cannot communicate a new event count to the input subsystem.
|
||||||
|
* Writing extra events into the buffer on those kernels is undefined
|
||||||
|
* behavior — the kernel won't deliver them and may behave erratically.
|
||||||
|
*/
|
||||||
|
{
|
||||||
|
struct input_value *syn_pos = NULL;
|
||||||
|
unsigned int max = handle->dev->max_vals;
|
||||||
|
|
||||||
|
/* Find the last SYN_REPORT so we can insert before it */
|
||||||
|
for (v = vals; v != end; v++) {
|
||||||
|
if (v->type == EV_SYN && v->code == SYN_REPORT)
|
||||||
|
syn_pos = v;
|
||||||
|
}
|
||||||
|
|
||||||
|
if (injected_x && synthetic_x_val != NONE_EVENT_VALUE && _count < max) {
|
||||||
|
if (syn_pos) {
|
||||||
|
/* Shift SYN_REPORT and everything after it forward by one */
|
||||||
|
memmove(syn_pos + 1, syn_pos, (end - syn_pos) * sizeof(*syn_pos));
|
||||||
|
syn_pos->type = EV_REL;
|
||||||
|
syn_pos->code = REL_X;
|
||||||
|
syn_pos->value = synthetic_x_val;
|
||||||
|
syn_pos++;
|
||||||
|
end++;
|
||||||
|
_count++;
|
||||||
|
}
|
||||||
|
dbg("rotation: injected synthetic REL_X = %d", synthetic_x_val);
|
||||||
|
}
|
||||||
|
|
||||||
|
if (injected_y && synthetic_y_val != NONE_EVENT_VALUE && _count < max) {
|
||||||
|
if (syn_pos) {
|
||||||
|
memmove(syn_pos + 1, syn_pos, (end - syn_pos) * sizeof(*syn_pos));
|
||||||
|
syn_pos->type = EV_REL;
|
||||||
|
syn_pos->code = REL_Y;
|
||||||
|
syn_pos->value = synthetic_y_val;
|
||||||
|
end++;
|
||||||
|
_count++;
|
||||||
|
}
|
||||||
|
dbg("rotation: injected synthetic REL_Y = %d", synthetic_y_val);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
#endif
|
||||||
|
|
||||||
|
handle->dev->num_vals = _count;
|
||||||
|
#if __cleanup_events
|
||||||
|
return _count;
|
||||||
|
#endif
|
||||||
|
}
|
||||||
|
|
||||||
|
/* Same as Linux's input_register_handle but we always add the handle to the
|
||||||
|
* head of handlers */
|
||||||
|
static int input_register_handle_head(struct input_handle *handle) {
|
||||||
|
struct input_handler *handler = handle->handler;
|
||||||
|
struct input_dev *dev = handle->dev;
|
||||||
|
|
||||||
|
#if (LINUX_VERSION_CODE >= KERNEL_VERSION(6, 11, 7))
|
||||||
|
/* In 6.11.7 an additional handler pointer was added:
|
||||||
|
* https://github.com/torvalds/linux/commit/071b24b54d2d05fbf39ddbb27dee08abd1d713f3
|
||||||
|
*/
|
||||||
|
if (handler->events)
|
||||||
|
handle->handle_events = handler->events;
|
||||||
|
#endif
|
||||||
|
|
||||||
|
int error = mutex_lock_interruptible(&dev->mutex);
|
||||||
|
if (error)
|
||||||
|
return error;
|
||||||
|
|
||||||
|
list_add_rcu(&handle->d_node, &dev->h_list);
|
||||||
|
mutex_unlock(&dev->mutex);
|
||||||
|
list_add_tail_rcu(&handle->h_node, &handler->h_list);
|
||||||
|
if (handler->start)
|
||||||
|
handler->start(handle);
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
|
||||||
|
static int maccel_connect(struct input_handler *handler, struct input_dev *dev,
|
||||||
|
const struct input_device_id *id) {
|
||||||
|
struct input_handle *handle;
|
||||||
|
int error;
|
||||||
|
|
||||||
|
handle = kzalloc(sizeof(struct input_handle), GFP_KERNEL);
|
||||||
|
if (!handle)
|
||||||
|
return -ENOMEM;
|
||||||
|
|
||||||
|
handle->dev = input_get_device(dev);
|
||||||
|
handle->handler = handler;
|
||||||
|
handle->name = "maccel";
|
||||||
|
|
||||||
|
error = input_register_handle_head(handle);
|
||||||
|
if (error)
|
||||||
|
goto err_free_mem;
|
||||||
|
|
||||||
|
error = input_open_device(handle);
|
||||||
|
if (error)
|
||||||
|
goto err_unregister_handle;
|
||||||
|
|
||||||
|
printk(KERN_INFO pr_fmt("maccel flags: DEBUG=%s; FIXEDPT_BITS=%d"),
|
||||||
|
DEBUG_TEST ? "true" : "false", FIXEDPT_BITS);
|
||||||
|
|
||||||
|
printk(KERN_INFO pr_fmt("maccel connecting to device: %s (%s at %s)"),
|
||||||
|
dev_name(&dev->dev), dev->name ?: "unknown", dev->phys ?: "unknown");
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
|
||||||
|
err_unregister_handle:
|
||||||
|
input_unregister_handle(handle);
|
||||||
|
|
||||||
|
err_free_mem:
|
||||||
|
kfree(handle);
|
||||||
|
return error;
|
||||||
|
}
|
||||||
|
|
||||||
|
static void maccel_disconnect(struct input_handle *handle) {
|
||||||
|
input_close_device(handle);
|
||||||
|
input_unregister_handle(handle);
|
||||||
|
kfree(handle);
|
||||||
|
}
|
||||||
|
|
||||||
|
static const struct input_device_id my_ids[] = {
|
||||||
|
{.flags = INPUT_DEVICE_ID_MATCH_EVBIT,
|
||||||
|
.evbit = {BIT_MASK(EV_REL)}}, // Match all relative pointer values
|
||||||
|
{},
|
||||||
|
};
|
||||||
|
|
||||||
|
MODULE_DEVICE_TABLE(input, my_ids);
|
||||||
|
|
||||||
|
struct input_handler maccel_handler = {.events = maccel_events,
|
||||||
|
.connect = maccel_connect,
|
||||||
|
.disconnect = maccel_disconnect,
|
||||||
|
.name = "maccel",
|
||||||
|
.id_table = my_ids};
|
||||||
@@ -0,0 +1,35 @@
|
|||||||
|
#include "./input_handler.h"
|
||||||
|
#include "input_echo.h"
|
||||||
|
|
||||||
|
/*
|
||||||
|
* We initialize the character driver for the userspace visualizations,
|
||||||
|
* and we register the input_handler.
|
||||||
|
*/
|
||||||
|
static int __init driver_initialization(void) {
|
||||||
|
int error;
|
||||||
|
error = create_char_device();
|
||||||
|
if (error)
|
||||||
|
return error;
|
||||||
|
|
||||||
|
error = input_register_handler(&maccel_handler);
|
||||||
|
if (error)
|
||||||
|
goto err_free_chrdev;
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
|
||||||
|
err_free_chrdev:
|
||||||
|
destroy_char_device();
|
||||||
|
return error;
|
||||||
|
}
|
||||||
|
|
||||||
|
static void __exit driver_exit(void) {
|
||||||
|
input_unregister_handler(&maccel_handler);
|
||||||
|
destroy_char_device();
|
||||||
|
}
|
||||||
|
|
||||||
|
MODULE_LICENSE("GPL");
|
||||||
|
MODULE_AUTHOR("Gnarus-G");
|
||||||
|
MODULE_DESCRIPTION("Mouse acceleration driver.");
|
||||||
|
|
||||||
|
module_init(driver_initialization);
|
||||||
|
module_exit(driver_exit);
|
||||||
@@ -0,0 +1,25 @@
|
|||||||
|
#ifndef _MATH_H_
|
||||||
|
#define _MATH_H_
|
||||||
|
|
||||||
|
#include "fixedptc.h"
|
||||||
|
|
||||||
|
struct vector {
|
||||||
|
fpt x;
|
||||||
|
fpt y;
|
||||||
|
};
|
||||||
|
|
||||||
|
static inline fpt magnitude(struct vector v) {
|
||||||
|
fpt x_square = fpt_mul(v.x, v.x);
|
||||||
|
fpt y_square = fpt_mul(v.y, v.y);
|
||||||
|
fpt x_square_plus_y_square = fpt_add(x_square, y_square);
|
||||||
|
|
||||||
|
dbg("dx^2 (in) %s", fptoa(x_square));
|
||||||
|
dbg("dy^2 (in) %s", fptoa(y_square));
|
||||||
|
dbg("square modulus (in) %s", fptoa(x_square_plus_y_square));
|
||||||
|
|
||||||
|
return fpt_sqrt(x_square_plus_y_square);
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline fpt minsd(fpt a, fpt b) { return (a < b) ? a : b; }
|
||||||
|
|
||||||
|
#endif // !_MATH_H_
|
||||||
@@ -0,0 +1,93 @@
|
|||||||
|
#include "dbg.h"
|
||||||
|
#include "linux/input.h"
|
||||||
|
#include <linux/stddef.h>
|
||||||
|
|
||||||
|
#define NONE_EVENT_VALUE 0
|
||||||
|
|
||||||
|
typedef struct {
|
||||||
|
int *x;
|
||||||
|
int *y;
|
||||||
|
} mouse_move;
|
||||||
|
|
||||||
|
static mouse_move MOVEMENT = {.x = NULL, .y = NULL};
|
||||||
|
|
||||||
|
/*
|
||||||
|
* Track whether we injected synthetic storage for a missing axis.
|
||||||
|
* When rotation is active and the mouse only reports one axis (e.g. pure
|
||||||
|
* horizontal movement -> only REL_X), we need a place for f_accelerate
|
||||||
|
* to write the rotated cross-axis component. These synthetic values
|
||||||
|
* are later injected into the event stream by maccel_events().
|
||||||
|
*/
|
||||||
|
static bool injected_x = false;
|
||||||
|
static bool injected_y = false;
|
||||||
|
static int synthetic_x_val = 0;
|
||||||
|
static int synthetic_y_val = 0;
|
||||||
|
|
||||||
|
static inline void update_mouse_move(struct input_value *value) {
|
||||||
|
switch (value->code) {
|
||||||
|
case REL_X:
|
||||||
|
MOVEMENT.x = &value->value;
|
||||||
|
break;
|
||||||
|
case REL_Y:
|
||||||
|
MOVEMENT.y = &value->value;
|
||||||
|
break;
|
||||||
|
default:
|
||||||
|
dbg("bad movement input_value: (code, value) = (%d, %d)", value->code,
|
||||||
|
value->value);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline int get_x(mouse_move movement) {
|
||||||
|
if (movement.x == NULL) {
|
||||||
|
return NONE_EVENT_VALUE;
|
||||||
|
}
|
||||||
|
return *movement.x;
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline int get_y(mouse_move movement) {
|
||||||
|
if (movement.y == NULL) {
|
||||||
|
return NONE_EVENT_VALUE;
|
||||||
|
}
|
||||||
|
return *movement.y;
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline void set_x_move(int value) {
|
||||||
|
if (MOVEMENT.x == NULL) {
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
*MOVEMENT.x = value;
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline void set_y_move(int value) {
|
||||||
|
if (MOVEMENT.y == NULL) {
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
*MOVEMENT.y = value;
|
||||||
|
}
|
||||||
|
|
||||||
|
/*
|
||||||
|
* When rotation is active and one axis is missing from the frame,
|
||||||
|
* point the missing axis to synthetic storage so f_accelerate can
|
||||||
|
* write the rotated component into it.
|
||||||
|
*/
|
||||||
|
static inline void ensure_axes_for_rotation(void) {
|
||||||
|
if (MOVEMENT.x == NULL) {
|
||||||
|
synthetic_x_val = 0;
|
||||||
|
MOVEMENT.x = &synthetic_x_val;
|
||||||
|
injected_x = true;
|
||||||
|
dbg("rotation: injecting synthetic REL_X storage (x=%d)", 0);
|
||||||
|
}
|
||||||
|
if (MOVEMENT.y == NULL) {
|
||||||
|
synthetic_y_val = 0;
|
||||||
|
MOVEMENT.y = &synthetic_y_val;
|
||||||
|
injected_y = true;
|
||||||
|
dbg("rotation: injecting synthetic REL_Y storage (y=%d)", 0);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline void clear_mouse_move(void) {
|
||||||
|
MOVEMENT.x = NULL;
|
||||||
|
MOVEMENT.y = NULL;
|
||||||
|
injected_x = false;
|
||||||
|
injected_y = false;
|
||||||
|
}
|
||||||
@@ -0,0 +1,90 @@
|
|||||||
|
#ifndef _PARAM_H_
|
||||||
|
#define _PARAM_H_
|
||||||
|
|
||||||
|
#include "accel/mode.h"
|
||||||
|
#include "fixedptc.h"
|
||||||
|
#include "linux/moduleparam.h"
|
||||||
|
|
||||||
|
#define RW_USER_GROUP 0664
|
||||||
|
|
||||||
|
#define PARAM(param, default_value, desc) \
|
||||||
|
char *PARAM_##param = #default_value; \
|
||||||
|
module_param_named(param, PARAM_##param, charp, RW_USER_GROUP); \
|
||||||
|
MODULE_PARM_DESC(param, desc);
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
PARAM(
|
||||||
|
SENS_MULT, 4294967296, // 1 << 32
|
||||||
|
"A factor applied by the sensitivity calculation after ACCEL is applied.");
|
||||||
|
PARAM(YX_RATIO, 4294967296, // 1 << 32
|
||||||
|
"A factor (Y/X) by which the final sensitivity calculated is multiplied "
|
||||||
|
"to produce the sensitivity applied to the Y axis.");
|
||||||
|
PARAM(INPUT_DPI, 4294967296000, // 1000 << 32
|
||||||
|
"The DPI of the mouse, used to normalize input to 1000 DPI equivalent "
|
||||||
|
"for consistent acceleration across different mice.");
|
||||||
|
#else
|
||||||
|
PARAM(SENS_MULT, 65536, // 1 << 16
|
||||||
|
"A factor applied the sensitivity calculation after ACCEL is applied.");
|
||||||
|
PARAM(YX_RATIO, 65536, // 1 << 16
|
||||||
|
"A factor (Y/X) by which the final sensitivity calculated is multiplied "
|
||||||
|
"to produce the sensitivity applied to the Y axis.");
|
||||||
|
PARAM(INPUT_DPI, 65536000, // 1000 << 16
|
||||||
|
"The DPI of the mouse, used to normalize input to 1000 DPI equivalent "
|
||||||
|
"for consistent acceleration across different mice.");
|
||||||
|
#endif
|
||||||
|
|
||||||
|
PARAM(ANGLE_ROTATION, 0,
|
||||||
|
"Apply rotation (degrees) to the mouse movement input");
|
||||||
|
// For Linear Mode
|
||||||
|
|
||||||
|
PARAM(ACCEL, 0, "Control the sensitivity calculation.");
|
||||||
|
PARAM(OFFSET, 0, "Input speed threshold (counts/ms) before acceleration begins.");
|
||||||
|
PARAM(OUTPUT_CAP, 0, "Control the maximum sensitivity.");
|
||||||
|
|
||||||
|
// For Natural Mode
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
PARAM(DECAY_RATE, 429496730, // 0.1 << 32
|
||||||
|
"Decay rate of the Natural curve.");
|
||||||
|
PARAM(LIMIT, 6442450944, // 1.5 << 32
|
||||||
|
"Limit of the Natural curve.");
|
||||||
|
#else
|
||||||
|
PARAM(DECAY_RATE, 6554, // 0.1 << 16
|
||||||
|
"Decay rate of the Natural curve");
|
||||||
|
PARAM(LIMIT, 98304, // 1.5 << 16
|
||||||
|
"Limit of the Natural curve");
|
||||||
|
#endif
|
||||||
|
|
||||||
|
// For Synchronous Mode
|
||||||
|
|
||||||
|
#if FIXEDPT_BITS == 64
|
||||||
|
PARAM(GAMMA, 4294967296, // 1 << 32
|
||||||
|
"Control how fast you get from low to fast around the midpoint");
|
||||||
|
PARAM(SMOOTH, 2147483648, // 0.5 << 32
|
||||||
|
"Control the suddeness of the sensitivity increase.");
|
||||||
|
PARAM(MOTIVITY, 6442450944, // 1.5 << 32
|
||||||
|
"Set the maximum sensitivity while also setting the minimum to "
|
||||||
|
"1/MOTIVITY");
|
||||||
|
PARAM(SYNC_SPEED, 21474836480, // 5 << 32
|
||||||
|
"Set The middle sensitivity between you min and max sensitivity");
|
||||||
|
#else
|
||||||
|
PARAM(GAMMA, 65536, // 1 << 16
|
||||||
|
"Control how fast you get from low to fast around the midpoint");
|
||||||
|
PARAM(SMOOTH, 32768, // 0.5 << 16
|
||||||
|
"Control the suddeness of the sensitivity increase.");
|
||||||
|
PARAM(MOTIVITY, 98304, // 1.5 << 16
|
||||||
|
"Set the maximum sensitivity while also setting the minimum to "
|
||||||
|
"1/MOTIVITY");
|
||||||
|
PARAM(SYNC_SPEED, 327680, // 5 << 16
|
||||||
|
"Set The middle sensitivity between you min and max sensitivity");
|
||||||
|
#endif
|
||||||
|
|
||||||
|
// Flags
|
||||||
|
#define PARAM_FLAG(param, default_value, desc) \
|
||||||
|
unsigned char PARAM_##param = default_value; \
|
||||||
|
module_param_named(param, PARAM_##param, byte, RW_USER_GROUP); \
|
||||||
|
MODULE_PARM_DESC(param, desc);
|
||||||
|
|
||||||
|
PARAM_FLAG(MODE, linear, "Desired type of acceleration.");
|
||||||
|
|
||||||
|
#endif // !_PARAM_H_
|
||||||
@@ -0,0 +1,34 @@
|
|||||||
|
#ifndef __SPEED_H__
|
||||||
|
#define __SPEED_H__
|
||||||
|
|
||||||
|
#include "dbg.h"
|
||||||
|
#include "fixedptc.h"
|
||||||
|
#include "math.h"
|
||||||
|
|
||||||
|
/**
|
||||||
|
* Track this to enable the UI to show the last noted
|
||||||
|
* input counts/ms (speed).
|
||||||
|
*/
|
||||||
|
static fpt LAST_INPUT_MOUSE_SPEED = 0;
|
||||||
|
|
||||||
|
static inline fpt input_speed(fpt dx, fpt dy, fpt time_ms) {
|
||||||
|
|
||||||
|
fpt distance = magnitude((struct vector){dx, dy});
|
||||||
|
|
||||||
|
if (distance == -1) {
|
||||||
|
dbg("distance calculation failed: t = %s", fptoa(time_ms));
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
|
||||||
|
dbg("distance (in) %s", fptoa(distance));
|
||||||
|
|
||||||
|
fpt speed = fpt_div(distance, time_ms);
|
||||||
|
LAST_INPUT_MOUSE_SPEED = speed;
|
||||||
|
|
||||||
|
dbg("time interval %s", fptoa(time_ms));
|
||||||
|
dbg("speed (in) %s", fptoa(speed));
|
||||||
|
|
||||||
|
return speed;
|
||||||
|
}
|
||||||
|
|
||||||
|
#endif // !__SPEED_H__
|
||||||
@@ -0,0 +1,187 @@
|
|||||||
|
#include "../accel.h"
|
||||||
|
#include "test_utils.h"
|
||||||
|
#include <stdio.h>
|
||||||
|
|
||||||
|
static int test_acceleration(const char *filename, struct accel_args args) {
|
||||||
|
const int LINE_LEN = 26;
|
||||||
|
const int MIN = -128;
|
||||||
|
const int MAX = 127;
|
||||||
|
|
||||||
|
char content[256 * 256 * LINE_LEN + 1];
|
||||||
|
strcpy(content, ""); // initialize as an empty string
|
||||||
|
|
||||||
|
for (int x = MIN; x < MAX; x++) {
|
||||||
|
for (int y = MIN; y < MAX; y++) {
|
||||||
|
|
||||||
|
int x_out = x;
|
||||||
|
int y_out = y;
|
||||||
|
|
||||||
|
f_accelerate(&x_out, &y_out, FIXEDPT_ONE, args);
|
||||||
|
|
||||||
|
char curr_debug_print[LINE_LEN];
|
||||||
|
|
||||||
|
sprintf(curr_debug_print, "(%d, %d) => (%d, %d)\n", x, y, x_out, y_out);
|
||||||
|
|
||||||
|
strcat(content, curr_debug_print);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
assert_snapshot(filename, content);
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
|
||||||
|
static int test_linear_acceleration(const char *filename, fpt param_sens_mult,
|
||||||
|
fpt param_yx_ratio, fpt param_accel,
|
||||||
|
fpt param_offset, fpt param_output_cap) {
|
||||||
|
struct linear_curve_args _args =
|
||||||
|
(struct linear_curve_args){.accel = param_accel,
|
||||||
|
.offset = param_offset,
|
||||||
|
.output_cap = param_output_cap};
|
||||||
|
|
||||||
|
struct accel_args args = {
|
||||||
|
.sens_mult = param_sens_mult,
|
||||||
|
.yx_ratio = param_yx_ratio,
|
||||||
|
.input_dpi = fpt_fromint(1000),
|
||||||
|
.tag = linear,
|
||||||
|
.args = (union __accel_args){.linear = _args},
|
||||||
|
};
|
||||||
|
|
||||||
|
return test_acceleration(filename, args);
|
||||||
|
}
|
||||||
|
|
||||||
|
static int test_natural_acceleration(const char *filename, fpt param_sens_mult,
|
||||||
|
fpt param_yx_ratio, fpt param_decay_rate,
|
||||||
|
fpt param_offset, fpt param_limit) {
|
||||||
|
struct natural_curve_args _args =
|
||||||
|
(struct natural_curve_args){.decay_rate = param_decay_rate,
|
||||||
|
.offset = param_offset,
|
||||||
|
.limit = param_limit};
|
||||||
|
|
||||||
|
struct accel_args args = {
|
||||||
|
.sens_mult = param_sens_mult,
|
||||||
|
.yx_ratio = param_yx_ratio,
|
||||||
|
.input_dpi = fpt_fromint(1000),
|
||||||
|
.tag = natural,
|
||||||
|
.args = (union __accel_args){.natural = _args},
|
||||||
|
};
|
||||||
|
|
||||||
|
return test_acceleration(filename, args);
|
||||||
|
}
|
||||||
|
|
||||||
|
static int test_synchronous_acceleration(const char *filename,
|
||||||
|
fpt param_sens_mult,
|
||||||
|
fpt param_yx_ratio, fpt param_gamma,
|
||||||
|
fpt param_smooth, fpt param_motivity,
|
||||||
|
fpt param_sync_speed) {
|
||||||
|
struct synchronous_curve_args _args =
|
||||||
|
(struct synchronous_curve_args){.gamma = param_gamma,
|
||||||
|
.smooth = param_smooth,
|
||||||
|
.motivity = param_motivity,
|
||||||
|
.sync_speed = param_sync_speed};
|
||||||
|
|
||||||
|
struct accel_args args = {
|
||||||
|
.sens_mult = param_sens_mult,
|
||||||
|
.yx_ratio = param_yx_ratio,
|
||||||
|
.input_dpi = fpt_fromint(1000),
|
||||||
|
.tag = synchronous,
|
||||||
|
.args = (union __accel_args){.synchronous = _args},
|
||||||
|
};
|
||||||
|
|
||||||
|
return test_acceleration(filename, args);
|
||||||
|
}
|
||||||
|
|
||||||
|
static int test_no_accel_acceleration(const char *filename, fpt param_sens_mult,
|
||||||
|
fpt param_yx_ratio) {
|
||||||
|
struct no_accel_curve_args _args = (struct no_accel_curve_args){};
|
||||||
|
|
||||||
|
struct accel_args args = {
|
||||||
|
.sens_mult = param_sens_mult,
|
||||||
|
.yx_ratio = param_yx_ratio,
|
||||||
|
.input_dpi = fpt_fromint(1000),
|
||||||
|
.tag = no_accel,
|
||||||
|
.args = (union __accel_args){.no_accel = _args},
|
||||||
|
};
|
||||||
|
|
||||||
|
return test_acceleration(filename, args);
|
||||||
|
}
|
||||||
|
|
||||||
|
static int test_rotation_no_accel(const char *filename, fpt param_sens_mult,
|
||||||
|
fpt param_angle_deg) {
|
||||||
|
struct no_accel_curve_args _args = (struct no_accel_curve_args){};
|
||||||
|
|
||||||
|
struct accel_args args = {
|
||||||
|
.sens_mult = param_sens_mult,
|
||||||
|
.yx_ratio = FIXEDPT_ONE,
|
||||||
|
.input_dpi = fpt_fromint(1000),
|
||||||
|
.angle_rotation_deg = param_angle_deg,
|
||||||
|
.tag = no_accel,
|
||||||
|
.args = (union __accel_args){.no_accel = _args},
|
||||||
|
};
|
||||||
|
|
||||||
|
return test_acceleration(filename, args);
|
||||||
|
}
|
||||||
|
|
||||||
|
#define test_linear(sens_mult, yx_ratio, accel, offset, cap) \
|
||||||
|
assert(test_linear_acceleration( \
|
||||||
|
"SENS_MULT-" #sens_mult "-ACCEL-" #accel "-OFFSET" #offset \
|
||||||
|
"-OUTPUT_CAP-" #cap ".snapshot", \
|
||||||
|
fpt_rconst(sens_mult), fpt_rconst(yx_ratio), fpt_rconst(accel), \
|
||||||
|
fpt_rconst(offset), fpt_rconst(cap)) == 0);
|
||||||
|
|
||||||
|
#define test_natural(sens_mult, yx_ratio, decay_rate, offset, limit) \
|
||||||
|
assert(test_natural_acceleration( \
|
||||||
|
"Natural__SENS_MULT-" #sens_mult "-DECAY_RATE-" #decay_rate \
|
||||||
|
"-OFFSET" #offset "-LIMIT-" #limit ".snapshot", \
|
||||||
|
fpt_rconst(sens_mult), fpt_rconst(yx_ratio), \
|
||||||
|
fpt_rconst(decay_rate), fpt_rconst(offset), \
|
||||||
|
fpt_rconst(limit)) == 0);
|
||||||
|
|
||||||
|
#define test_synchronous(sens_mult, yx_ratio, gamma, smooth, motivity, \
|
||||||
|
sync_speed) \
|
||||||
|
assert(test_synchronous_acceleration( \
|
||||||
|
"Synchronous__SENS_MULT-" #sens_mult "-GAMMA-" #gamma \
|
||||||
|
"-SMOOTH" #smooth "-MOTIVITY-" #motivity \
|
||||||
|
"-SYNC_SPEED-" #sync_speed ".snapshot", \
|
||||||
|
fpt_rconst(sens_mult), fpt_rconst(yx_ratio), fpt_rconst(gamma), \
|
||||||
|
fpt_rconst(smooth), fpt_rconst(motivity), \
|
||||||
|
fpt_rconst(sync_speed)) == 0);
|
||||||
|
|
||||||
|
#define test_no_accel(sens_mult, yx_ratio) \
|
||||||
|
assert(test_no_accel_acceleration( \
|
||||||
|
"NoAccel__SENS_MULT-" #sens_mult "-YX_RATIO-" #yx_ratio \
|
||||||
|
".snapshot", \
|
||||||
|
fpt_rconst(sens_mult), fpt_rconst(yx_ratio)) == 0);
|
||||||
|
|
||||||
|
#define test_rotation(sens_mult, angle_deg) \
|
||||||
|
assert(test_rotation_no_accel( \
|
||||||
|
"Rotation__SENS_MULT-" #sens_mult "-ANGLE-" #angle_deg \
|
||||||
|
".snapshot", \
|
||||||
|
fpt_rconst(sens_mult), fpt_rconst(angle_deg)) == 0);
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
test_linear(1, 1, 0, 0, 0);
|
||||||
|
test_linear(1, 1, 0.3, 2, 2);
|
||||||
|
test_linear(0.1325, 1, 0.3, 21.333333, 2);
|
||||||
|
test_linear(0.1875, 1, 0.05625, 10.6666666, 2);
|
||||||
|
test_linear(0.0917, 1, 0.002048, 78.125, 2.0239);
|
||||||
|
test_linear(0.07, 1.15, 0.055, 21, 3);
|
||||||
|
|
||||||
|
test_natural(1, 1, 0, 0, 0);
|
||||||
|
test_natural(1, 1, 0.1, 0, 0);
|
||||||
|
test_natural(1, 1, 0.1, 8, 0);
|
||||||
|
test_natural(1, 1, 0.03, 8, 1.5);
|
||||||
|
|
||||||
|
test_synchronous(1, 1.15, 0.8, 0.5, 1.5, 32);
|
||||||
|
|
||||||
|
test_no_accel(1, 1);
|
||||||
|
test_no_accel(0.5, 1.5);
|
||||||
|
|
||||||
|
/* Rotation tests: verify cross-axis output when one axis is 0.
|
||||||
|
* At 45 degrees, (10, 0) should produce roughly (7, 7) - not (10, 0).
|
||||||
|
* At 90 degrees, (10, 0) should produce roughly (0, 10). */
|
||||||
|
test_rotation(1, 45);
|
||||||
|
test_rotation(1, 90);
|
||||||
|
|
||||||
|
print_success;
|
||||||
|
}
|
||||||
@@ -0,0 +1,41 @@
|
|||||||
|
#include "../fixedptc.h"
|
||||||
|
#include "./test_utils.h"
|
||||||
|
#include <assert.h>
|
||||||
|
#include <stdio.h>
|
||||||
|
#include <time.h>
|
||||||
|
|
||||||
|
void test_eq(char *value, double expected) {
|
||||||
|
fpt n = atofp(value);
|
||||||
|
double actual = fpt_todouble(n);
|
||||||
|
dbg("actual: (%li) %.15f, vs expected: %.15f\n", n, actual, expected);
|
||||||
|
assert(actual == expected);
|
||||||
|
}
|
||||||
|
|
||||||
|
void super_tiny_micro_minuscule_bench() {
|
||||||
|
int iterations = 100000;
|
||||||
|
double sum = 0;
|
||||||
|
for (int i = 0; i < iterations; i++) {
|
||||||
|
struct timespec begin, end;
|
||||||
|
clock_gettime(CLOCK_MONOTONIC_RAW, &begin);
|
||||||
|
|
||||||
|
fpt n = atofp("1826512586328");
|
||||||
|
dbg("atofp(\"1826512586328\") = %li\n", n);
|
||||||
|
|
||||||
|
clock_gettime(CLOCK_MONOTONIC_RAW, &end);
|
||||||
|
sum += (double)(end.tv_nsec - begin.tv_nsec);
|
||||||
|
}
|
||||||
|
|
||||||
|
double avg = sum / iterations;
|
||||||
|
printf(" Avg run time is %fns\n", avg);
|
||||||
|
}
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
test_eq("1073741824", 0.25);
|
||||||
|
test_eq("536870912", 0.125);
|
||||||
|
test_eq("1342177280", 0.3125);
|
||||||
|
test_eq("-335007449088", -78);
|
||||||
|
|
||||||
|
print_success;
|
||||||
|
|
||||||
|
super_tiny_micro_minuscule_bench();
|
||||||
|
}
|
||||||
@@ -0,0 +1,45 @@
|
|||||||
|
#include "../dbg.h"
|
||||||
|
#include "../fixedptc.h"
|
||||||
|
#include "test_utils.h"
|
||||||
|
#include <assert.h>
|
||||||
|
#include <stdint.h>
|
||||||
|
|
||||||
|
void test_custom_division_against_fixedpt(double a, double b) {
|
||||||
|
#if FIXEDPT_BITS == 32
|
||||||
|
return;
|
||||||
|
#else
|
||||||
|
|
||||||
|
fpt n = fpt_rconst(a);
|
||||||
|
fpt divisor = fpt_rconst(b);
|
||||||
|
|
||||||
|
fpt quotient = div128_s64_s64(n, divisor);
|
||||||
|
fpt quotient1 = fpt_xdiv(n, divisor);
|
||||||
|
|
||||||
|
double actual = fpt_todouble(quotient);
|
||||||
|
double expected = fpt_todouble(quotient1);
|
||||||
|
|
||||||
|
dbg("actual = (%li) -> %.10f", quotient, actual);
|
||||||
|
dbg("expect = (%li) -> %.10f", quotient1, expected);
|
||||||
|
|
||||||
|
assert(actual == expected);
|
||||||
|
#endif
|
||||||
|
}
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
|
||||||
|
test_custom_division_against_fixedpt(57, 5.5);
|
||||||
|
|
||||||
|
test_custom_division_against_fixedpt(0, 2.57);
|
||||||
|
|
||||||
|
test_custom_division_against_fixedpt(-1, 3);
|
||||||
|
|
||||||
|
test_custom_division_against_fixedpt(-128, 4);
|
||||||
|
|
||||||
|
test_custom_division_against_fixedpt(127, 1.5);
|
||||||
|
|
||||||
|
/* test_custom_division_against_fixedpth(135, 0); */ // You only crash once!
|
||||||
|
|
||||||
|
print_success;
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
@@ -0,0 +1,27 @@
|
|||||||
|
#include "../fixedptc.h"
|
||||||
|
#include "test_utils.h"
|
||||||
|
#include <assert.h>
|
||||||
|
#include <linux/limits.h>
|
||||||
|
#include <unistd.h>
|
||||||
|
|
||||||
|
int assert_string_value(char *filename, double value) {
|
||||||
|
fpt v = fpt_rconst(value);
|
||||||
|
char *_v = fptoa(v);
|
||||||
|
|
||||||
|
dbg("to_string %f = %s", value, _v);
|
||||||
|
|
||||||
|
assert_snapshot(filename, _v);
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
|
||||||
|
#define test_str(value) \
|
||||||
|
assert(assert_string_value(__FILE_NAME__ "_" #value ".snapshot", value) == 0)
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
test_str(0.25);
|
||||||
|
test_str(0.125);
|
||||||
|
test_str(0.3125);
|
||||||
|
test_str(-785);
|
||||||
|
|
||||||
|
print_success;
|
||||||
|
}
|
||||||
@@ -0,0 +1,48 @@
|
|||||||
|
#include "../speed.h"
|
||||||
|
#include "./test_utils.h"
|
||||||
|
#include <stdio.h>
|
||||||
|
|
||||||
|
int assert_string_value(char *filename, double x, double y, double t) {
|
||||||
|
fpt dx = fpt_rconst(x);
|
||||||
|
fpt dy = fpt_rconst(y);
|
||||||
|
fpt dt = fpt_rconst(t);
|
||||||
|
|
||||||
|
dbg("in (%f, %f)", x, y);
|
||||||
|
dbg("in: x (fpt conversion) %s", fptoa(x));
|
||||||
|
dbg("in: y (fpt conversion) %s", fptoa(y));
|
||||||
|
|
||||||
|
fpt s = input_speed(dx, dy, dt);
|
||||||
|
|
||||||
|
double res = fpt_todouble(s);
|
||||||
|
dbg("(%f, %f) dt = %f -> %f\n", x, y, t, res);
|
||||||
|
|
||||||
|
char content[100];
|
||||||
|
sprintf(content, "(sqrt(%f, %f) / %f) = %f\n", x, y, t, res);
|
||||||
|
|
||||||
|
assert_snapshot(filename, content);
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
|
||||||
|
#define test(x, y, time) \
|
||||||
|
assert(assert_string_value(__FILE_NAME__ "_sqrt_" #x "_" #y "_" #time \
|
||||||
|
".snapshot", \
|
||||||
|
x, y, time) == 0)
|
||||||
|
|
||||||
|
int main(void) {
|
||||||
|
test(1, 1, 1);
|
||||||
|
test(1, 21, 1);
|
||||||
|
test(64, -37, 1);
|
||||||
|
test(1, 4, 1);
|
||||||
|
|
||||||
|
test(-1, 1, 4);
|
||||||
|
|
||||||
|
test(1, 0, 100);
|
||||||
|
|
||||||
|
test(1, -1, 100);
|
||||||
|
|
||||||
|
test(-1, -24, 1);
|
||||||
|
|
||||||
|
print_success;
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
@@ -0,0 +1,10 @@
|
|||||||
|
#!/bin/bash
|
||||||
|
|
||||||
|
for test in tests/*.test.c; do
|
||||||
|
if [[ ! $test =~ $TEST_NAME ]]; then
|
||||||
|
continue
|
||||||
|
fi
|
||||||
|
gcc ${test} -o maccel_test -lm $DRIVER_CFLAGS || exit 1
|
||||||
|
./maccel_test || exit 1
|
||||||
|
rm maccel_test
|
||||||
|
done
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
-785.000000000
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
0.125000000
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
0.250000000
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
0.312500000
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(-1.000000, -24.000000) / 1.000000) = 24.020824
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(-1.000000, 1.000000) / 4.000000) = 0.353553
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(1.000000, -1.000000) / 100.000000) = 0.014142
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(1.000000, 0.000000) / 100.000000) = 0.010000
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(1.000000, 1.000000) / 1.000000) = 1.414214
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(1.000000, 21.000000) / 1.000000) = 21.023796
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(1.000000, 4.000000) / 1.000000) = 4.123106
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
(sqrt(64.000000, -37.000000) / 1.000000) = 73.925638
|
||||||
@@ -0,0 +1,137 @@
|
|||||||
|
#include <assert.h>
|
||||||
|
#include <linux/limits.h>
|
||||||
|
#include <stdio.h>
|
||||||
|
#include <stdlib.h>
|
||||||
|
#include <string.h>
|
||||||
|
#include <sys/stat.h>
|
||||||
|
#include <sys/wait.h>
|
||||||
|
#include <unistd.h>
|
||||||
|
|
||||||
|
static int diff(const char *content, const char *filename) {
|
||||||
|
|
||||||
|
int pipe_fd[2];
|
||||||
|
pid_t child_pid;
|
||||||
|
|
||||||
|
// Create a pipe for communication
|
||||||
|
if (pipe(pipe_fd) == -1) {
|
||||||
|
perror("Pipe creation failed");
|
||||||
|
exit(EXIT_FAILURE);
|
||||||
|
}
|
||||||
|
|
||||||
|
// Fork the process
|
||||||
|
if ((child_pid = fork()) == -1) {
|
||||||
|
perror("Fork failed");
|
||||||
|
exit(EXIT_FAILURE);
|
||||||
|
}
|
||||||
|
|
||||||
|
if (child_pid == 0) { // Child process
|
||||||
|
// Close the write end of the pipe
|
||||||
|
close(pipe_fd[1]);
|
||||||
|
|
||||||
|
// Redirect stdin to read from the pipe
|
||||||
|
dup2(pipe_fd[0], STDIN_FILENO);
|
||||||
|
|
||||||
|
// Execute a command (e.g., "wc -l")
|
||||||
|
execlp("diff", "diff", "-u", "--color", filename, "-", NULL);
|
||||||
|
|
||||||
|
// If execlp fails
|
||||||
|
perror("Exec failed");
|
||||||
|
exit(EXIT_FAILURE);
|
||||||
|
} else { // Parent process
|
||||||
|
// Close the read end of the pipe
|
||||||
|
close(pipe_fd[0]);
|
||||||
|
|
||||||
|
// Write data to the child process
|
||||||
|
if (write(pipe_fd[1], content, strlen(content)) == -1) {
|
||||||
|
perror("failed to write content to the pipe for diff");
|
||||||
|
}
|
||||||
|
|
||||||
|
close(pipe_fd[1]);
|
||||||
|
|
||||||
|
// Wait for the child process to finish
|
||||||
|
wait(NULL);
|
||||||
|
}
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
|
||||||
|
static int get_current_working_dir(char *buf, size_t buf_size) {
|
||||||
|
if (getcwd(buf, buf_size) != NULL) {
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
|
perror("getcwd() error");
|
||||||
|
return 1;
|
||||||
|
}
|
||||||
|
|
||||||
|
static char *create_snapshot_file_path(const char *filename) {
|
||||||
|
char cwd[PATH_MAX];
|
||||||
|
if (get_current_working_dir(cwd, PATH_MAX)) {
|
||||||
|
return NULL;
|
||||||
|
};
|
||||||
|
|
||||||
|
static char filepath[PATH_MAX];
|
||||||
|
sprintf(filepath, "%s/tests/snapshots/%s", cwd, filename);
|
||||||
|
return filepath;
|
||||||
|
}
|
||||||
|
|
||||||
|
static void assert_snapshot(const char *__filename, const char *content) {
|
||||||
|
char *filename = create_snapshot_file_path(__filename);
|
||||||
|
if (filename == NULL) {
|
||||||
|
fprintf(stderr, "failed to create snapshot file: %s\n", filename);
|
||||||
|
exit(1);
|
||||||
|
}
|
||||||
|
|
||||||
|
int snapshot_file_exists = access(filename, F_OK) != -1;
|
||||||
|
FILE *snapshot_file;
|
||||||
|
|
||||||
|
if (snapshot_file_exists) {
|
||||||
|
snapshot_file = fopen(filename, "r");
|
||||||
|
} else {
|
||||||
|
snapshot_file = fopen(filename, "w");
|
||||||
|
}
|
||||||
|
|
||||||
|
if (snapshot_file == NULL) {
|
||||||
|
fprintf(stderr, "failed to open or create the snapshot file: %s\n",
|
||||||
|
filename);
|
||||||
|
exit(1);
|
||||||
|
}
|
||||||
|
|
||||||
|
if (snapshot_file_exists) {
|
||||||
|
struct stat stats;
|
||||||
|
int file_size;
|
||||||
|
|
||||||
|
stat(filename, &stats);
|
||||||
|
file_size = stats.st_size;
|
||||||
|
char *snapshot = (char *)malloc(stats.st_size + 1);
|
||||||
|
|
||||||
|
if (snapshot == NULL) {
|
||||||
|
fprintf(stderr,
|
||||||
|
"failed to allocate %zd bytes of a string for the snapshot "
|
||||||
|
"content in file: %s\n",
|
||||||
|
stats.st_size, filename);
|
||||||
|
exit(1);
|
||||||
|
}
|
||||||
|
|
||||||
|
size_t bytes_read = fread(snapshot, 1, file_size, snapshot_file);
|
||||||
|
if (bytes_read != file_size) {
|
||||||
|
fprintf(stderr, "failed to read a snapshot file %s\n", filename);
|
||||||
|
exit(1);
|
||||||
|
}
|
||||||
|
snapshot[file_size] = 0; // null byte terminator
|
||||||
|
|
||||||
|
int string_test_diff = strcmp(snapshot, content);
|
||||||
|
|
||||||
|
diff(content, filename);
|
||||||
|
|
||||||
|
/* dbg("diff in content = %d: snapshot '%s' vs now '%s'", string_test, */
|
||||||
|
/* snapshot, content); */
|
||||||
|
assert(string_test_diff == 0);
|
||||||
|
} else {
|
||||||
|
fprintf(snapshot_file, "%s", content);
|
||||||
|
printf("created a snapshot file %s\n", filename);
|
||||||
|
}
|
||||||
|
|
||||||
|
fclose(snapshot_file);
|
||||||
|
}
|
||||||
|
|
||||||
|
#define print_success printf("[%s]\t\tAll tests passed!\n", __FILE_NAME__)
|
||||||
@@ -0,0 +1,28 @@
|
|||||||
|
#ifndef _UTILS_H_
|
||||||
|
#define _UTILS_H_
|
||||||
|
|
||||||
|
#ifdef __KERNEL__
|
||||||
|
#include <linux/types.h>
|
||||||
|
#else
|
||||||
|
#include <stdint.h>
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#include "dbg.h"
|
||||||
|
|
||||||
|
static inline int64_t div128_s64_s64_s64(int64_t high, int64_t low,
|
||||||
|
int64_t divisor) {
|
||||||
|
int64_t result;
|
||||||
|
// s.high.low
|
||||||
|
// high -> rdx
|
||||||
|
// low -> rax
|
||||||
|
uint64_t remainder;
|
||||||
|
__asm__("idivq %[B]"
|
||||||
|
: "=a"(result), "=d"(remainder)
|
||||||
|
: [B] "r"(divisor), "a"(low), "d"(high));
|
||||||
|
|
||||||
|
return result;
|
||||||
|
}
|
||||||
|
|
||||||
|
static inline int is_digit(char c) { return '0' <= c && c <= '9'; }
|
||||||
|
|
||||||
|
#endif
|
||||||
@@ -0,0 +1,203 @@
|
|||||||
|
#!/bin/sh
|
||||||
|
|
||||||
|
BRANCH=${BRANCH:-""}
|
||||||
|
DEBUG=${DEBUG:-0}
|
||||||
|
BUILD_CLI_FROM_SOURCE=${BUILD_CLI_FROM_SOURCE:-0}
|
||||||
|
|
||||||
|
set -e
|
||||||
|
|
||||||
|
bold_start() {
|
||||||
|
printf "\e[1m"
|
||||||
|
}
|
||||||
|
|
||||||
|
bold_end() {
|
||||||
|
printf "\e[22m"
|
||||||
|
}
|
||||||
|
|
||||||
|
print_bold() {
|
||||||
|
bold_start
|
||||||
|
printf "$1"
|
||||||
|
bold_end
|
||||||
|
}
|
||||||
|
|
||||||
|
print_yellow() {
|
||||||
|
printf "\e[33m$1\e[0m"
|
||||||
|
}
|
||||||
|
|
||||||
|
print_green() {
|
||||||
|
printf "\e[32m$1\e[0m"
|
||||||
|
}
|
||||||
|
|
||||||
|
underline_start() {
|
||||||
|
printf "\e[4m"
|
||||||
|
}
|
||||||
|
|
||||||
|
underline_end() {
|
||||||
|
printf "\e[24m\n"
|
||||||
|
}
|
||||||
|
|
||||||
|
get_current_version(){
|
||||||
|
if ! which maccel &>/dev/null; then
|
||||||
|
return
|
||||||
|
fi
|
||||||
|
|
||||||
|
maccel -V | awk '{ print $2 }'
|
||||||
|
}
|
||||||
|
|
||||||
|
get_version() {
|
||||||
|
wget -qO- https://github.com/Gnarus-G/maccel/releases/latest | grep -oP 'v\d+\.\d+\.\d+' | tail -n 1 | cut -c 2-
|
||||||
|
}
|
||||||
|
|
||||||
|
CURR_VERSION=$(get_current_version)
|
||||||
|
VERSION=$(get_version)
|
||||||
|
|
||||||
|
set -e
|
||||||
|
|
||||||
|
setup_dirs() {
|
||||||
|
rm -rf /opt/maccel && mkdir -p /opt/maccel
|
||||||
|
cd /opt/maccel
|
||||||
|
|
||||||
|
if [ -n "$BRANCH" ]; then
|
||||||
|
print_bold "Will do an install, using the branch: $BRANCH\n"
|
||||||
|
git clone --depth 1 --no-single-branch https://github.com/Gnarus-G/maccel.git .
|
||||||
|
git switch $BRANCH
|
||||||
|
else
|
||||||
|
git clone --depth 1 https://github.com/Gnarus-G/maccel.git .
|
||||||
|
fi
|
||||||
|
}
|
||||||
|
|
||||||
|
version_update_warning() {
|
||||||
|
if [ -z "$CURR_VERSION" ]; then
|
||||||
|
return
|
||||||
|
fi
|
||||||
|
|
||||||
|
MARKER_VERSION="0.4.0"
|
||||||
|
|
||||||
|
if [ "$CURR_VERSION" = "$MARKER_VERSION" ]; then
|
||||||
|
return
|
||||||
|
fi
|
||||||
|
|
||||||
|
if [[ "$CURR_VERSION" < "$MARKER_VERSION" ]]; then
|
||||||
|
print_yellow $(print_bold "ATTENTION!")
|
||||||
|
printf "\n\n"
|
||||||
|
|
||||||
|
print_yellow "The precision for the processed values has been updated since version '$CURR_VERSION';\n"
|
||||||
|
EMPHASIS=$(print_bold "MUST re-enter your parameter values in maccel")
|
||||||
|
print_yellow "This means that you $EMPHASIS.\n"
|
||||||
|
print_yellow "Otherwise your curve and mouse movement won't behave as expected.\n"
|
||||||
|
|
||||||
|
printf "\nHere were your values as maccel understands them in '$CURR_VERSION':\n"
|
||||||
|
|
||||||
|
print_bold "SENS MULT: "
|
||||||
|
maccel get param sens-mult
|
||||||
|
|
||||||
|
print_bold "ACCEL: "
|
||||||
|
maccel get param accel
|
||||||
|
|
||||||
|
print_bold "OFFSET: "
|
||||||
|
maccel get param offset
|
||||||
|
|
||||||
|
print_bold "OUTPUT CAP: "
|
||||||
|
maccel get param output-cap
|
||||||
|
fi
|
||||||
|
}
|
||||||
|
|
||||||
|
install_udev_rules() {
|
||||||
|
make udev_uninstall
|
||||||
|
make udev_install
|
||||||
|
}
|
||||||
|
|
||||||
|
install_driver_dkms() {
|
||||||
|
dkms_version=$(cat PKGBUILD | grep "pkgver=" | grep -oP '\d.\d.\d')
|
||||||
|
|
||||||
|
! sudo rmmod maccel 2>/dev/null; # It's obviously okay if this fails
|
||||||
|
|
||||||
|
# Uninstall if this version already exists
|
||||||
|
test -n "$(sudo dkms status maccel/$dkms_version)" && {
|
||||||
|
sudo dkms remove maccel/$dkms_version
|
||||||
|
}
|
||||||
|
|
||||||
|
# Install Driver
|
||||||
|
install -Dm 644 "$(pwd)/dkms.conf" "/usr/src/maccel-${dkms_version}/dkms.conf"
|
||||||
|
|
||||||
|
DEBUG_CFLAGS=""
|
||||||
|
if [ $DEBUG -eq 1 ]; then
|
||||||
|
print_bold "Debug build enabled\n"
|
||||||
|
DEBUG_CFLAGS="-g -DDEBUG"
|
||||||
|
fi
|
||||||
|
|
||||||
|
# Set name and version
|
||||||
|
sudo sed -e "s/@_PKGNAME@/maccel/" \
|
||||||
|
-e "s/@PKGVER@/${dkms_version}/" \
|
||||||
|
-e "s/@DRIVER_CFLAGS@/'${DEBUG_CFLAGS}'/" \
|
||||||
|
-i "/usr/src/maccel-${dkms_version}/dkms.conf"
|
||||||
|
|
||||||
|
sudo cp -r "$(pwd)/driver/." "/usr/src/maccel-${dkms_version}/"
|
||||||
|
|
||||||
|
sudo dkms install --force "maccel/${dkms_version}"
|
||||||
|
|
||||||
|
# Note(Gnarus):
|
||||||
|
# This wouldn't ok in the .install file as noted in https://wiki.archlinux.org/title/DKMS_package_guidelines#Module_loading_automatically_in_.install
|
||||||
|
# But I think it's ok here.
|
||||||
|
sudo modprobe maccel
|
||||||
|
}
|
||||||
|
|
||||||
|
install_cli() {
|
||||||
|
if [ $(getconf LONG_BIT) -lt 64 ]; then
|
||||||
|
BUILD_CLI_FROM_SOURCE=1
|
||||||
|
fi
|
||||||
|
|
||||||
|
if [ $BUILD_CLI_FROM_SOURCE -eq 1 ]; then
|
||||||
|
export RUSTUP_TOOLCHAIN=stable
|
||||||
|
cargo build --bin maccel --release
|
||||||
|
sudo install -m 755 `pwd`/target/release/maccel /usr/local/bin/maccel
|
||||||
|
else
|
||||||
|
print_bold "Preparing to download and install the CLI tool...\n"
|
||||||
|
printf "If you want to build the CLI tool from source, then next time run: \n"
|
||||||
|
print_bold " curl -fsSL https://maccel.org/install.sh | sudo BUILD_CLI_FROM_SOURCE=1 sh \n"
|
||||||
|
curl -fsSL https://github.com/Gnarus-G/maccel/releases/download/v$VERSION/maccel-cli.tar.gz -o maccel-cli.tar.gz
|
||||||
|
tar -zxvf maccel-cli.tar.gz maccel_v$VERSION/maccel
|
||||||
|
mkdir -p bin
|
||||||
|
sudo install -m 755 -v -D maccel_v$VERSION/maccel* bin/
|
||||||
|
sudo ln -vfs $(pwd)/bin/maccel* /usr/local/bin/
|
||||||
|
fi
|
||||||
|
|
||||||
|
sudo groupadd -f maccel
|
||||||
|
}
|
||||||
|
|
||||||
|
# ---- Install Process ----
|
||||||
|
|
||||||
|
ATTENTION=$(version_update_warning)
|
||||||
|
|
||||||
|
underline_start
|
||||||
|
print_bold "\nFetching the maccel github repo"
|
||||||
|
underline_end
|
||||||
|
|
||||||
|
setup_dirs
|
||||||
|
|
||||||
|
underline_start
|
||||||
|
print_bold "\nInstalling udev rules..."
|
||||||
|
underline_end
|
||||||
|
|
||||||
|
install_udev_rules
|
||||||
|
|
||||||
|
underline_start
|
||||||
|
print_bold "\nInstalling the driver (kernel module)"
|
||||||
|
underline_end
|
||||||
|
|
||||||
|
install_driver_dkms
|
||||||
|
|
||||||
|
underline_start
|
||||||
|
print_bold "\nInstalling the CLI"
|
||||||
|
underline_end
|
||||||
|
|
||||||
|
install_cli
|
||||||
|
|
||||||
|
print_bold $(print_green "[Recommended]")
|
||||||
|
print_bold ' Add yourself to the "maccel" group\n'
|
||||||
|
print_bold $(print_green "[Recommended]")
|
||||||
|
print_bold ' usermod -aG maccel $USER\n'
|
||||||
|
|
||||||
|
if [ -n "$ATTENTION" ]; then
|
||||||
|
printf "\n$ATTENTION\n"
|
||||||
|
fi
|
||||||
@@ -0,0 +1,16 @@
|
|||||||
|
post_install() {
|
||||||
|
echo ''
|
||||||
|
echo ' Add yourself to the "maccel" group and install the module!'
|
||||||
|
echo ' usermod -aG maccel $USER;'
|
||||||
|
echo ' modprobe maccel;'
|
||||||
|
echo ''
|
||||||
|
}
|
||||||
|
|
||||||
|
post_upgrade() {
|
||||||
|
echo ''
|
||||||
|
echo ' Remember to reload the module!'
|
||||||
|
echo ' rmmod maccel && modprobe maccel'
|
||||||
|
echo ''
|
||||||
|
}
|
||||||
|
|
||||||
|
# post_remove() { }
|
||||||
@@ -0,0 +1 @@
|
|||||||
|
g maccel - -
|
||||||
@@ -0,0 +1,275 @@
|
|||||||
|
# NixOS module for maccel mouse acceleration driver
|
||||||
|
{
|
||||||
|
config,
|
||||||
|
lib,
|
||||||
|
pkgs,
|
||||||
|
...
|
||||||
|
}:
|
||||||
|
with lib; let
|
||||||
|
cfg = config.hardware.maccel;
|
||||||
|
|
||||||
|
# Extract version from PKGBUILD
|
||||||
|
pkgbuildContent = builtins.readFile ./PKGBUILD;
|
||||||
|
kernelModuleVersion = builtins.head (builtins.match ".*pkgver=([^[:space:]]+).*" pkgbuildContent);
|
||||||
|
|
||||||
|
# Extract version from cli/Cargo.toml
|
||||||
|
cliCargoToml = builtins.fromTOML (builtins.readFile ./cli/Cargo.toml);
|
||||||
|
cliVersion = cliCargoToml.package.version;
|
||||||
|
|
||||||
|
# Convert float to fixed-point integer (64-bit, 32 fractional bits)
|
||||||
|
fixedPointScale = 4294967296; # 2^32
|
||||||
|
toFixedPoint = value: builtins.floor (value * fixedPointScale + 0.5);
|
||||||
|
|
||||||
|
# Mode enum mapping (from driver/accel/mode.h)
|
||||||
|
modeMap = {
|
||||||
|
linear = 0;
|
||||||
|
natural = 1;
|
||||||
|
synchronous = 2;
|
||||||
|
no_accel = 3;
|
||||||
|
};
|
||||||
|
|
||||||
|
# Parameter mapping (from driver/params.h)
|
||||||
|
parameterMap = {
|
||||||
|
# Common parameters
|
||||||
|
SENS_MULT = cfg.parameters.sensMultiplier;
|
||||||
|
YX_RATIO = cfg.parameters.yxRatio;
|
||||||
|
INPUT_DPI = cfg.parameters.inputDpi;
|
||||||
|
ANGLE_ROTATION = cfg.parameters.angleRotation;
|
||||||
|
MODE = cfg.parameters.mode;
|
||||||
|
|
||||||
|
# Linear mode parameters
|
||||||
|
ACCEL = cfg.parameters.acceleration;
|
||||||
|
OFFSET = cfg.parameters.offset;
|
||||||
|
OUTPUT_CAP = cfg.parameters.outputCap;
|
||||||
|
|
||||||
|
# Natural mode parameters
|
||||||
|
DECAY_RATE = cfg.parameters.decayRate;
|
||||||
|
LIMIT = cfg.parameters.limit;
|
||||||
|
|
||||||
|
# Synchronous mode parameters
|
||||||
|
GAMMA = cfg.parameters.gamma;
|
||||||
|
SMOOTH = cfg.parameters.smooth;
|
||||||
|
MOTIVITY = cfg.parameters.motivity;
|
||||||
|
SYNC_SPEED = cfg.parameters.syncSpeed;
|
||||||
|
};
|
||||||
|
|
||||||
|
# Generate modprobe parameter string
|
||||||
|
kernelModuleParams = let
|
||||||
|
validParams = filterAttrs (_: v: v != null) parameterMap;
|
||||||
|
formatParam = name: value:
|
||||||
|
if name == "MODE"
|
||||||
|
then "${name}=${toString (modeMap.${value})}"
|
||||||
|
else "${name}=${toString (toFixedPoint value)}";
|
||||||
|
in
|
||||||
|
concatStringsSep " " (mapAttrsToList formatParam validParams);
|
||||||
|
|
||||||
|
# Build kernel module
|
||||||
|
maccel-kernel-module = config.boot.kernelPackages.callPackage ({
|
||||||
|
lib,
|
||||||
|
stdenv,
|
||||||
|
kernel,
|
||||||
|
}:
|
||||||
|
stdenv.mkDerivation rec {
|
||||||
|
pname = "maccel-dkms";
|
||||||
|
version = kernelModuleVersion;
|
||||||
|
|
||||||
|
src = ./.;
|
||||||
|
|
||||||
|
nativeBuildInputs = kernel.moduleBuildDependencies;
|
||||||
|
|
||||||
|
makeFlags =
|
||||||
|
[
|
||||||
|
"KVER=${kernel.modDirVersion}"
|
||||||
|
"KDIR=${kernel.dev}/lib/modules/${kernel.modDirVersion}/build"
|
||||||
|
"DRIVER_CFLAGS=-DFIXEDPT_BITS=64"
|
||||||
|
]
|
||||||
|
++ optionals cfg.debug ["DRIVER_CFLAGS+=-g -DDEBUG"];
|
||||||
|
|
||||||
|
preBuild = "cd driver";
|
||||||
|
|
||||||
|
installPhase = ''
|
||||||
|
mkdir -p $out/lib/modules/${kernel.modDirVersion}/kernel/drivers/usb
|
||||||
|
cp maccel.ko $out/lib/modules/${kernel.modDirVersion}/kernel/drivers/usb/
|
||||||
|
'';
|
||||||
|
|
||||||
|
meta = with lib; {
|
||||||
|
description = "Mouse acceleration driver and kernel module for Linux.";
|
||||||
|
homepage = "https://www.maccel.org/";
|
||||||
|
license = licenses.gpl2Plus;
|
||||||
|
platforms = platforms.linux;
|
||||||
|
};
|
||||||
|
}) {};
|
||||||
|
|
||||||
|
# Optional CLI tools
|
||||||
|
maccel-cli = pkgs.rustPlatform.buildRustPackage rec {
|
||||||
|
pname = "maccel-cli";
|
||||||
|
version = cliVersion;
|
||||||
|
|
||||||
|
src = ./.;
|
||||||
|
|
||||||
|
cargoLock.lockFile = "${src}/Cargo.lock";
|
||||||
|
|
||||||
|
cargoBuildFlags = ["--bin" "maccel"];
|
||||||
|
|
||||||
|
meta = with lib; {
|
||||||
|
description = "CLI and TUI tools for configuring maccel.";
|
||||||
|
homepage = "https://www.maccel.org/";
|
||||||
|
license = licenses.gpl2Plus;
|
||||||
|
platforms = platforms.linux;
|
||||||
|
};
|
||||||
|
};
|
||||||
|
in {
|
||||||
|
options.hardware.maccel = {
|
||||||
|
enable = mkEnableOption "Enable maccel mouse acceleration driver (kernel module). Parameters must be configured via `hardware.maccel.parameters`.";
|
||||||
|
|
||||||
|
debug = mkOption {
|
||||||
|
type = types.bool;
|
||||||
|
default = false;
|
||||||
|
description = "Enable debug build of the kernel module.";
|
||||||
|
};
|
||||||
|
|
||||||
|
enableCli = mkOption {
|
||||||
|
type = types.bool;
|
||||||
|
default = false;
|
||||||
|
description = "Install CLI and TUI tools for real-time parameter tuning. You may add your user to the `maccel` group using `users.groups.maccel.members = [\"your_username\"];` to run maccel CLI/TUI without sudo. Note: Changes made via CLI/TUI are temporary and do not persist across reboots. Use this to discover optimal parameter values, then apply them permanently via `hardware.maccel.parameters`.";
|
||||||
|
};
|
||||||
|
|
||||||
|
parameters = {
|
||||||
|
# Common parameters
|
||||||
|
sensMultiplier = mkOption {
|
||||||
|
type = types.nullOr types.float;
|
||||||
|
default = null;
|
||||||
|
description = "Sensitivity multiplier applied after acceleration calculation.";
|
||||||
|
};
|
||||||
|
|
||||||
|
yxRatio = mkOption {
|
||||||
|
type = types.nullOr types.float;
|
||||||
|
default = null;
|
||||||
|
description = "Y/X ratio - factor by which Y-axis sensitivity is multiplied.";
|
||||||
|
};
|
||||||
|
|
||||||
|
inputDpi = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x > 0.0)
|
||||||
|
// {description = "positive float";});
|
||||||
|
default = null;
|
||||||
|
description = "DPI of the mouse, used to normalize effective DPI. Must be positive.";
|
||||||
|
};
|
||||||
|
|
||||||
|
angleRotation = mkOption {
|
||||||
|
type = types.nullOr types.float;
|
||||||
|
default = null;
|
||||||
|
description = "Apply rotation in degrees to mouse movement input.";
|
||||||
|
};
|
||||||
|
|
||||||
|
mode = mkOption {
|
||||||
|
type = types.nullOr (types.enum ["linear" "natural" "synchronous" "no_accel"]);
|
||||||
|
default = null;
|
||||||
|
description = "Acceleration mode.";
|
||||||
|
};
|
||||||
|
|
||||||
|
# Linear mode parameters
|
||||||
|
acceleration = mkOption {
|
||||||
|
type = types.nullOr types.float;
|
||||||
|
default = null;
|
||||||
|
description = "Linear acceleration factor.";
|
||||||
|
};
|
||||||
|
|
||||||
|
offset = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x >= 0.0)
|
||||||
|
// {description = "non-negative float";});
|
||||||
|
default = null;
|
||||||
|
description = "Input speed past which to allow acceleration. Cannot be negative.";
|
||||||
|
};
|
||||||
|
|
||||||
|
outputCap = mkOption {
|
||||||
|
type = types.nullOr types.float;
|
||||||
|
default = null;
|
||||||
|
description = "Maximum sensitivity multiplier cap.";
|
||||||
|
};
|
||||||
|
|
||||||
|
# Natural mode parameters
|
||||||
|
decayRate = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x > 0.0)
|
||||||
|
// {description = "positive float";});
|
||||||
|
default = null;
|
||||||
|
description = "Decay rate of the Natural acceleration curve. Must be positive.";
|
||||||
|
};
|
||||||
|
|
||||||
|
limit = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x >= 1.0)
|
||||||
|
// {description = "float >= 1.0";});
|
||||||
|
default = null;
|
||||||
|
description = "Limit of the Natural acceleration curve. Cannot be less than 1.";
|
||||||
|
};
|
||||||
|
|
||||||
|
# Synchronous mode parameters
|
||||||
|
gamma = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x > 0.0)
|
||||||
|
// {description = "positive float";});
|
||||||
|
default = null;
|
||||||
|
description = "Controls how fast you get from low to fast around the midpoint. Must be positive.";
|
||||||
|
};
|
||||||
|
|
||||||
|
smooth = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x >= 0.0 && x <= 1.0)
|
||||||
|
// {description = "float between 0.0 and 1.0";});
|
||||||
|
default = null;
|
||||||
|
description = "Controls the suddenness of the sensitivity increase. Must be between 0 and 1.";
|
||||||
|
};
|
||||||
|
|
||||||
|
motivity = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x > 1.0)
|
||||||
|
// {description = "float > 1.0";});
|
||||||
|
default = null;
|
||||||
|
description = "Sets max sensitivity while setting min to 1/motivity. Must be greater than 1.";
|
||||||
|
};
|
||||||
|
|
||||||
|
syncSpeed = mkOption {
|
||||||
|
type =
|
||||||
|
types.nullOr (types.addCheck types.float (x: x > 0.0)
|
||||||
|
// {description = "positive float";});
|
||||||
|
default = null;
|
||||||
|
description = "Sets the middle sensitivity between min and max sensitivity. Must be positive.";
|
||||||
|
};
|
||||||
|
};
|
||||||
|
};
|
||||||
|
|
||||||
|
config = mkIf cfg.enable {
|
||||||
|
# Add kernel module
|
||||||
|
boot.extraModulePackages = [maccel-kernel-module];
|
||||||
|
|
||||||
|
# Load module with parameters
|
||||||
|
boot.kernelModules = ["maccel"];
|
||||||
|
boot.extraModprobeConfig = mkIf (kernelModuleParams != "") ''
|
||||||
|
options maccel ${kernelModuleParams}
|
||||||
|
'';
|
||||||
|
|
||||||
|
# Create maccel group
|
||||||
|
users.groups.maccel = {};
|
||||||
|
|
||||||
|
# Install CLI tools if requested
|
||||||
|
environment.systemPackages = mkIf cfg.enableCli [maccel-cli];
|
||||||
|
|
||||||
|
# Create reset scripts directory
|
||||||
|
systemd.tmpfiles.rules = mkIf cfg.enableCli [
|
||||||
|
"d /var/opt/maccel/resets 0775 root maccel"
|
||||||
|
];
|
||||||
|
|
||||||
|
# Add udev rules
|
||||||
|
services.udev.extraRules = mkIf cfg.enableCli ''
|
||||||
|
# Set sysfs parameter permissions
|
||||||
|
ACTION=="add", SUBSYSTEM=="module", DEVPATH=="/module/maccel", \
|
||||||
|
RUN+="${pkgs.coreutils}/bin/chgrp -R maccel /sys/module/maccel/parameters"
|
||||||
|
# Set /dev/maccel character device permissions
|
||||||
|
ACTION=="add", KERNEL=="maccel", \
|
||||||
|
GROUP="maccel", MODE="0640"
|
||||||
|
'';
|
||||||
|
};
|
||||||
|
}
|
||||||
@@ -0,0 +1,21 @@
|
|||||||
|
# build output
|
||||||
|
dist/
|
||||||
|
|
||||||
|
# generated types
|
||||||
|
.astro/
|
||||||
|
|
||||||
|
# dependencies
|
||||||
|
node_modules/
|
||||||
|
|
||||||
|
# logs
|
||||||
|
npm-debug.log*
|
||||||
|
yarn-debug.log*
|
||||||
|
yarn-error.log*
|
||||||
|
pnpm-debug.log*
|
||||||
|
|
||||||
|
# environment variables
|
||||||
|
.env
|
||||||
|
.env.production
|
||||||
|
|
||||||
|
# macOS-specific files
|
||||||
|
.DS_Store
|
||||||
@@ -0,0 +1,4 @@
|
|||||||
|
{
|
||||||
|
"recommendations": ["astro-build.astro-vscode"],
|
||||||
|
"unwantedRecommendations": []
|
||||||
|
}
|
||||||
@@ -0,0 +1,11 @@
|
|||||||
|
{
|
||||||
|
"version": "0.2.0",
|
||||||
|
"configurations": [
|
||||||
|
{
|
||||||
|
"command": "./node_modules/.bin/astro dev",
|
||||||
|
"name": "Development server",
|
||||||
|
"request": "launch",
|
||||||
|
"type": "node-terminal"
|
||||||
|
}
|
||||||
|
]
|
||||||
|
}
|
||||||
@@ -0,0 +1,54 @@
|
|||||||
|
# Astro Starter Kit: Basics
|
||||||
|
|
||||||
|
```sh
|
||||||
|
npm create astro@latest -- --template basics
|
||||||
|
```
|
||||||
|
|
||||||
|
[](https://stackblitz.com/github/withastro/astro/tree/latest/examples/basics)
|
||||||
|
[](https://codesandbox.io/p/sandbox/github/withastro/astro/tree/latest/examples/basics)
|
||||||
|
[](https://codespaces.new/withastro/astro?devcontainer_path=.devcontainer/basics/devcontainer.json)
|
||||||
|
|
||||||
|
> 🧑🚀 **Seasoned astronaut?** Delete this file. Have fun!
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
## 🚀 Project Structure
|
||||||
|
|
||||||
|
Inside of your Astro project, you'll see the following folders and files:
|
||||||
|
|
||||||
|
```text
|
||||||
|
/
|
||||||
|
├── public/
|
||||||
|
│ └── favicon.svg
|
||||||
|
├── src/
|
||||||
|
│ ├── components/
|
||||||
|
│ │ └── Card.astro
|
||||||
|
│ ├── layouts/
|
||||||
|
│ │ └── Layout.astro
|
||||||
|
│ └── pages/
|
||||||
|
│ └── index.astro
|
||||||
|
└── package.json
|
||||||
|
```
|
||||||
|
|
||||||
|
Astro looks for `.astro` or `.md` files in the `src/pages/` directory. Each page is exposed as a route based on its file name.
|
||||||
|
|
||||||
|
There's nothing special about `src/components/`, but that's where we like to put any Astro/React/Vue/Svelte/Preact components.
|
||||||
|
|
||||||
|
Any static assets, like images, can be placed in the `public/` directory.
|
||||||
|
|
||||||
|
## 🧞 Commands
|
||||||
|
|
||||||
|
All commands are run from the root of the project, from a terminal:
|
||||||
|
|
||||||
|
| Command | Action |
|
||||||
|
| :------------------------ | :----------------------------------------------- |
|
||||||
|
| `npm install` | Installs dependencies |
|
||||||
|
| `npm run dev` | Starts local dev server at `localhost:4321` |
|
||||||
|
| `npm run build` | Build your production site to `./dist/` |
|
||||||
|
| `npm run preview` | Preview your build locally, before deploying |
|
||||||
|
| `npm run astro ...` | Run CLI commands like `astro add`, `astro check` |
|
||||||
|
| `npm run astro -- --help` | Get help using the Astro CLI |
|
||||||
|
|
||||||
|
## 👀 Want to learn more?
|
||||||
|
|
||||||
|
Feel free to check [our documentation](https://docs.astro.build) or jump into our [Discord server](https://astro.build/chat).
|
||||||
@@ -0,0 +1,9 @@
|
|||||||
|
import { defineConfig } from "astro/config";
|
||||||
|
|
||||||
|
import tailwind from "@astrojs/tailwind";
|
||||||
|
|
||||||
|
// https://astro.build/config
|
||||||
|
export default defineConfig({
|
||||||
|
site: "https://www.maccel.org",
|
||||||
|
integrations: [tailwind()],
|
||||||
|
});
|
||||||
@@ -0,0 +1,26 @@
|
|||||||
|
{
|
||||||
|
"name": "maccel-site",
|
||||||
|
"type": "module",
|
||||||
|
"version": "0.0.1",
|
||||||
|
"engines": {
|
||||||
|
"node": "^24.0.0"
|
||||||
|
},
|
||||||
|
"scripts": {
|
||||||
|
"dev": "astro dev",
|
||||||
|
"start": "astro dev",
|
||||||
|
"build": "astro check && astro build",
|
||||||
|
"preview": "astro preview",
|
||||||
|
"astro": "astro"
|
||||||
|
},
|
||||||
|
"dependencies": {
|
||||||
|
"@astrojs/check": "^0.4.1",
|
||||||
|
"@astrojs/tailwind": "^5.1.0",
|
||||||
|
"@types/node": "^20.11.16",
|
||||||
|
"astro": "^4.2.8",
|
||||||
|
"tailwindcss": "^3.4.1",
|
||||||
|
"typescript": "^5.3.3"
|
||||||
|
},
|
||||||
|
"devDependencies": {
|
||||||
|
"@tailwindcss/typography": "^0.5.10"
|
||||||
|
}
|
||||||
|
}
|
||||||
{kind=link}
|
After Width: | Height: | Size: 266 KiB |
{kind=link}
|
After Width: | Height: | Size: 330 KiB |
{kind=link}
|
After Width: | Height: | Size: 330 KiB |
{kind=link}
|
After Width: | Height: | Size: 266 KiB |
{kind=link}
|
After Width: | Height: | Size: 161 KiB |
{kind=link}
|
After Width: | Height: | Size: 246 KiB |
{kind=link}
|
After Width: | Height: | Size: 193 KiB |
@@ -0,0 +1,109 @@
|
|||||||
|
## Mouse Pointer Acceleration on Linux.
|
||||||
|
|
||||||
|
### Why?
|
||||||
|
|
||||||
|
Many gamers, specifically those whom enjoy first person shooters, know that you should disable the mouse pointer acceleration
|
||||||
|
that windows has enabled by default. You disable it so that you get a 1:1 correlation between how you mouse physically and how
|
||||||
|
the pointer moves.
|
||||||
|
|
||||||
|
Some of us, however, know that mouse acceleration, if done right, can be very useful and that windows just does it very poorly.
|
||||||
|
I became convinced of this after some youtube videos on the subject, mainly this [video](https://www.youtube.com/watch?v=SBXv0xi-wyQ) by [pinguefy](https://www.youtube.com/@Pinguefy).
|
||||||
|
We also know that [Raw Accel](https://github.com/a1xd/rawaccel/blob/master/doc/Guide.md), a mouse pointer acceleration driver for **windows**, does it right.
|
||||||
|
|
||||||
|
### Linux
|
||||||
|
|
||||||
|
We want rawaccel on **linux** too, but we won't get it.
|
||||||
|
So we're relegated to projects like [leetmouse](https://github.com/Skyl3r/leetmouse) that I found difficult to install,
|
||||||
|
and user unfriendly; or [libinput](https://wiki.archlinux.org/title/Libinput) with a [custom acceleration profile](https://wayland.freedesktop.org/libinput/doc/latest/pointer-acceleration.html#the-custom-acceleration-profile).
|
||||||
|
|
||||||
|
Now, my gripe with `leetmouse` comes down to, mostly, skill issue. I eventually got it working, but it was still hard to change
|
||||||
|
parameters since I had to recompile the source code to do so.
|
||||||
|
|
||||||
|
My gripe with `libinput` is that while having a terrible user experience on par `leetmouse`, it is also impossible to express
|
||||||
|
certain curves. I even built a [cli tool](https://github.com/Gnarus-G/libinput-custom-points-gen) to generate the configuration that will approximate the curve I want.
|
||||||
|
|
||||||
|
Accel=0.3; Offset=2; CAP=2;
|
||||||
|
|
||||||
|
```sh
|
||||||
|
libinput-points 0.3 2 2 -x
|
||||||
|
```
|
||||||
|
|
||||||
|
```
|
||||||
|
Section "InputClass"
|
||||||
|
Identifier "My Mouse"
|
||||||
|
Driver "libinput"
|
||||||
|
MatchIsPointer "yes"
|
||||||
|
|
||||||
|
Option "AccelProfile" "custom"
|
||||||
|
Option "AccelStepMotion" "1"
|
||||||
|
Option "AccelPointsMotion" "0 1 2 3.3 5.2 7.699999999999999 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52 54 56 58 60 62 64 66 68 70 72 74 76 78 80 82 84 86 88 90 92 94 96 98 100 102 104 106 108 110 112 114 116 118 120 122 124"
|
||||||
|
EndSection
|
||||||
|
|
||||||
|
```
|
||||||
|
|
||||||
|
If you need more context on this, refer to [libinput xorg configuration](https://wiki.archlinux.org/title/Libinput#Via_Xorg_configuration_file), and [libinput properties](https://man.archlinux.org/man/libinput.4#SUPPORTED_PROPERTIES).
|
||||||
|
I don't recommend using `libinput-points` to mimic Rawaccel's linear acceleration because, when I built it, I understood much less than I do now
|
||||||
|
about how the math works.
|
||||||
|
|
||||||
|
Note then, that my main goal, and only goal for the moment, is to replicate the linear type acceleration option from `Rawaccel`
|
||||||
|
|
||||||
|
### Solution: Home-made driver
|
||||||
|
|
||||||
|
So we need an easy install story, and a very easy configuration story.
|
||||||
|
|
||||||
|
I made my own driver, [maccel](https://github.com/Gnarus-G/maccel). It's easy enough for me to install. Sometimes a system might be missing some
|
||||||
|
dependencies and it can be a chore getting them; But past that hurdle is a decent enough cli tool with a user friendly Terminal UI.
|
||||||
|
|
||||||
|
```sh
|
||||||
|
maccel tui
|
||||||
|
```
|
||||||
|
|
||||||
|
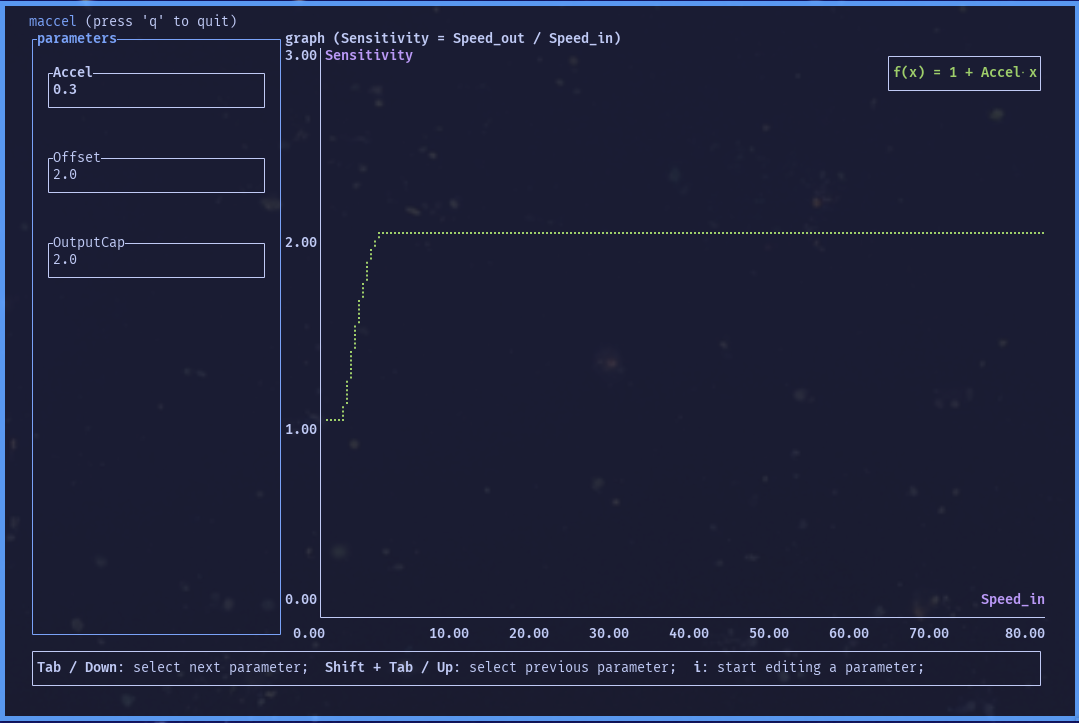
|
||||||
|
|
||||||
|
## Install Dependencies
|
||||||
|
|
||||||
|
Make sure to have these dependencies installed on your machine:
|
||||||
|
`curl`, `git`, `make`, `gcc`, and the linux headers in `/lib/modules/`
|
||||||
|
|
||||||
|
### gcc
|
||||||
|
|
||||||
|
The version matters, it must match the version with which the kernel was built.
|
||||||
|
|
||||||
|
For example you might encounter such an error:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
And you'll have to find a version of `gcc` that matches. This will be more or less annoying
|
||||||
|
depending on your distro and/or how familiar you are with it.
|
||||||
|
|
||||||
|
### linux headers
|
||||||
|
|
||||||
|
You want to make sure that `/lib/modules/` is not empty. For example mine looks like this:
|
||||||
|
|
||||||
|
```
|
||||||
|
total 0
|
||||||
|
drwxr-xr-x 1 root root 114 Jan 29 17:59 .
|
||||||
|
drwxr-xr-x 1 root root 159552 Jan 29 22:39 ..
|
||||||
|
drwxr-xr-x 1 root root 10 Jan 29 17:59 6.6.14-1-lts
|
||||||
|
drwxr-xr-x 1 root root 12 Jan 29 17:59 6.7.0-zen3-1-zen
|
||||||
|
drwxr-xr-x 1 root root 494 Jan 29 17:59 6.7.2-arch1-1
|
||||||
|
drwxr-xr-x 1 root root 494 Jan 31 21:54 6.7.2-zen1-1-zen
|
||||||
|
```
|
||||||
|
|
||||||
|
You want to find headers that match your kernel as represented by
|
||||||
|
|
||||||
|
```
|
||||||
|
uname -r
|
||||||
|
```
|
||||||
|
|
||||||
|
On an arch based distro you list the available headers with
|
||||||
|
|
||||||
|
```
|
||||||
|
sudo pacman -Ss linux headers
|
||||||
|
```
|
||||||
|
|
||||||
|
## Uninstall
|
||||||
|
|
||||||
|
```sh
|
||||||
|
sudo sh /opt/maccel/uninstall.sh
|
||||||
|
```
|
||||||
@@ -0,0 +1,42 @@
|
|||||||
|
<script>
|
||||||
|
const copyButtons = document.querySelectorAll("code > [data-copy-button]")
|
||||||
|
|
||||||
|
copyButtons.forEach(button => {
|
||||||
|
const content = button.parentElement?.textContent?.trim();
|
||||||
|
if (content) {
|
||||||
|
button.addEventListener("click", async () => {
|
||||||
|
await navigator.clipboard.writeText(content)
|
||||||
|
|
||||||
|
button.setAttribute("data-copied", "");
|
||||||
|
|
||||||
|
setTimeout(() => {
|
||||||
|
button.removeAttribute("data-copied");
|
||||||
|
}, 2000)
|
||||||
|
})
|
||||||
|
}
|
||||||
|
})
|
||||||
|
</script>
|
||||||
|
|
||||||
|
<button class="absolute right-0 group" data-copy-button>
|
||||||
|
<svg xmlns="http://www.w3.org/2000/svg" height="24" viewBox="0 -960 960 960" width="24"
|
||||||
|
fill="currentColor"
|
||||||
|
stroke="currentColor"
|
||||||
|
stroke-width="2"
|
||||||
|
stroke-linecap="round"
|
||||||
|
stroke-linejoin="round"
|
||||||
|
class="h-6 w-6 group-data-[copied]:hidden"
|
||||||
|
>
|
||||||
|
<path d="M360-240q-33 0-56.5-23.5T280-320v-480q0-33 23.5-56.5T360-880h360q33 0 56.5 23.5T800-800v480q0 33-23.5 56.5T720-240H360Zm0-80h360v-480H360v480ZM200-80q-33 0-56.5-23.5T120-160v-560h80v560h440v80H200Zm160-240v-480 480Z"/>
|
||||||
|
</svg>
|
||||||
|
|
||||||
|
<svg xmlns="http://www.w3.org/2000/svg" height="24" viewBox="0 -960 960 960" width="24"
|
||||||
|
fill="currentColor"
|
||||||
|
stroke="currentColor"
|
||||||
|
stroke-width="2"
|
||||||
|
stroke-linecap="round"
|
||||||
|
stroke-linejoin="round"
|
||||||
|
class="h-6 w-6 hidden group-data-[copied]:inline"
|
||||||
|
>
|
||||||
|
<path d="M382-240 154-468l57-57 171 171 367-367 57 57-424 424Z"/>
|
||||||
|
</svg>
|
||||||
|
</button>
|
||||||
@@ -0,0 +1,21 @@
|
|||||||
|
---
|
||||||
|
const today = new Date();
|
||||||
|
---
|
||||||
|
|
||||||
|
<footer class="flex flex-col gap-5 items-center p-5 text-slate-100">
|
||||||
|
<p>
|
||||||
|
© {today.getFullYear()} Gnarus G. Powered by <a href="https://astro.build" target="_blank">Astro</a>. All rights reserved.
|
||||||
|
</p>
|
||||||
|
<div class="flex justify-center">
|
||||||
|
<a class="hover:text-slate-500" href="https://github.com/Gnarus-G" target="_blank">
|
||||||
|
<span class="sr-only">Go to my github</span>
|
||||||
|
<svg viewBox="0 0 16 16" aria-hidden="true" width="32" height="32" astro-icon="social/github"
|
||||||
|
><path
|
||||||
|
fill="currentColor"
|
||||||
|
d="M8 0C3.58 0 0 3.58 0 8c0 3.54 2.29 6.53 5.47 7.59.4.07.55-.17.55-.38 0-.19-.01-.82-.01-1.49-2.01.37-2.53-.49-2.69-.94-.09-.23-.48-.94-.82-1.13-.28-.15-.68-.52-.01-.53.63-.01 1.08.58 1.23.82.72 1.21 1.87.87 2.33.66.07-.52.28-.87.51-1.07-1.78-.2-3.64-.89-3.64-3.95 0-.87.31-1.59.82-2.15-.08-.2-.36-1.02.08-2.12 0 0 .67-.21 2.2.82.64-.18 1.32-.27 2-.27.68 0 1.36.09 2 .27 1.53-1.04 2.2-.82 2.2-.82.44 1.1.16 1.92.08 2.12.51.56.82 1.27.82 2.15 0 3.07-1.87 3.75-3.65 3.95.29.25.54.73.54 1.48 0 1.07-.01 1.93-.01 2.2 0 .21.15.46.55.38A8.012 8.012 0 0 0 16 8c0-4.42-3.58-8-8-8z"
|
||||||
|
></path></svg
|
||||||
|
>
|
||||||
|
</a>
|
||||||
|
</div>
|
||||||
|
</footer>
|
||||||
|
|
||||||
@@ -0,0 +1,2 @@
|
|||||||
|
/// <reference path="../.astro/types.d.ts" />
|
||||||
|
/// <reference types="astro/client" />
|
||||||
@@ -0,0 +1,42 @@
|
|||||||
|
---
|
||||||
|
import Footer from "../components/Footer.astro"
|
||||||
|
interface Props {
|
||||||
|
title: string;
|
||||||
|
description: string;
|
||||||
|
}
|
||||||
|
|
||||||
|
const { title, description } = Astro.props;
|
||||||
|
---
|
||||||
|
|
||||||
|
<!doctype html>
|
||||||
|
<html lang="en">
|
||||||
|
<head>
|
||||||
|
<meta charset="UTF-8" />
|
||||||
|
<meta name="description" content={description}/>
|
||||||
|
<meta name="viewport" content="width=device-width" />
|
||||||
|
<link rel="icon" type="image/png" href="/favicon.png" />
|
||||||
|
<meta name="generator" content={Astro.generator} />
|
||||||
|
<title>{title}</title>
|
||||||
|
<meta name="og:image" content={new URL("/logo.png", Astro.url)}/>
|
||||||
|
</head>
|
||||||
|
<body class="bg-slate-800">
|
||||||
|
<slot />
|
||||||
|
<Footer/>
|
||||||
|
</body>
|
||||||
|
</html>
|
||||||
|
<style is:global>
|
||||||
|
html {
|
||||||
|
font-family: system-ui, sans-serif;
|
||||||
|
}
|
||||||
|
code {
|
||||||
|
font-family:
|
||||||
|
Menlo,
|
||||||
|
Monaco,
|
||||||
|
Lucida Console,
|
||||||
|
Liberation Mono,
|
||||||
|
DejaVu Sans Mono,
|
||||||
|
Bitstream Vera Sans Mono,
|
||||||
|
Courier New,
|
||||||
|
monospace;
|
||||||
|
}
|
||||||
|
</style>
|
||||||
@@ -0,0 +1,76 @@
|
|||||||
|
---
|
||||||
|
import Layout from '../layouts/Layout.astro';
|
||||||
|
import CopyButton from '../components/CopyButton.astro';
|
||||||
|
import Why from "../WHY.md"
|
||||||
|
|
||||||
|
const installUrl = new URL("install.sh", Astro.site);
|
||||||
|
---
|
||||||
|
|
||||||
|
<Layout title="maccel" description="Maccel is a mouse pointer acceleration driver with a CLI and TUI to customize acceleration curves (Linear, Natural, Synchronous) and their parameters.">
|
||||||
|
<header class="flex justify-between items-center p-5 bg-gray-900">
|
||||||
|
<img class="object-cover rounded-full" width="32" src="/logo.png" alt=""/>
|
||||||
|
<section id="links" class="flex justify-center">
|
||||||
|
<a class="text-slate-100 hover:text-slate-500" href="https://github.com/Gnarus-G/maccel" target="_blank">
|
||||||
|
<span class="sr-only">Go see the project on github</span>
|
||||||
|
<svg viewBox="0 0 16 16" aria-hidden="true" width="32" height="32" astro-icon="social/github"
|
||||||
|
><path
|
||||||
|
fill="currentColor"
|
||||||
|
d="M8 0C3.58 0 0 3.58 0 8c0 3.54 2.29 6.53 5.47 7.59.4.07.55-.17.55-.38 0-.19-.01-.82-.01-1.49-2.01.37-2.53-.49-2.69-.94-.09-.23-.48-.94-.82-1.13-.28-.15-.68-.52-.01-.53.63-.01 1.08.58 1.23.82.72 1.21 1.87.87 2.33.66.07-.52.28-.87.51-1.07-1.78-.2-3.64-.89-3.64-3.95 0-.87.31-1.59.82-2.15-.08-.2-.36-1.02.08-2.12 0 0 .67-.21 2.2.82.64-.18 1.32-.27 2-.27.68 0 1.36.09 2 .27 1.53-1.04 2.2-.82 2.2-.82.44 1.1.16 1.92.08 2.12.51.56.82 1.27.82 2.15 0 3.07-1.87 3.75-3.65 3.95.29.25.54.73.54 1.48 0 1.07-.01 1.93-.01 2.2 0 .21.15.46.55.38A8.012 8.012 0 0 0 16 8c0-4.42-3.58-8-8-8z"
|
||||||
|
></path>
|
||||||
|
</svg>
|
||||||
|
</a>
|
||||||
|
</section>
|
||||||
|
</header>
|
||||||
|
<main>
|
||||||
|
<div>
|
||||||
|
<section id="cta" class="w-full px-3 py-12 md:py-24 lg:py-32 bg-gray-900">
|
||||||
|
<div class="container mx-auto max-w-[65ch] space-y-4">
|
||||||
|
<div class="space-y-2">
|
||||||
|
<h1 class="text-gray-100 text-3xl font-bold tracking-tighter sm:text-4xl md:text-5xl lg:text-6xl/none">
|
||||||
|
maccel
|
||||||
|
</h1>
|
||||||
|
<p class="max-w-lg text-gray-300 md:text-xl">
|
||||||
|
A mouse pointer <strong>acceleration</strong> driver with a <strong>CLI</strong> and <strong>TUI</strong> to easily customize acceleration curves and their <strong>parameters</strong>.
|
||||||
|
Install now and enhance your aim.
|
||||||
|
</p>
|
||||||
|
</div>
|
||||||
|
<div>
|
||||||
|
<div class="w-full p-4 bg-gray-950 text-gray-50 rounded-md border border-solid border-amber-800">
|
||||||
|
<code class="relative flex items-center gap-5 text-sm text-gray-400">
|
||||||
|
<a title="Make sure your system has some things installed." href="#install-dependencies">
|
||||||
|
<svg
|
||||||
|
xmlns="http://www.w3.org/2000/svg"
|
||||||
|
width="24"
|
||||||
|
height="24"
|
||||||
|
viewBox="0 0 24 24"
|
||||||
|
fill="none"
|
||||||
|
stroke="currentColor"
|
||||||
|
stroke-width="2"
|
||||||
|
stroke-linecap="round"
|
||||||
|
stroke-linejoin="round"
|
||||||
|
class="h-5 w-5 text-yellow-500"
|
||||||
|
>
|
||||||
|
<path d="m21.73 18-8-14a2 2 0 0 0-3.48 0l-8 14A2 2 0 0 0 4 21h16a2 2 0 0 0 1.73-3Z"></path>
|
||||||
|
<path d="M12 9v4"></path>
|
||||||
|
<path d="M12 17h.01"></path>
|
||||||
|
</svg>
|
||||||
|
</a>
|
||||||
|
curl -fsSL {installUrl} | sudo sh
|
||||||
|
<CopyButton />
|
||||||
|
</code>
|
||||||
|
</div>
|
||||||
|
<div class="flex justify-end">
|
||||||
|
<a class="text-slate-500" href="/install.sh">View source</a>
|
||||||
|
</div>
|
||||||
|
</div>
|
||||||
|
</div>
|
||||||
|
</section>
|
||||||
|
<section id="why" class="w-full px-3 py-12 md:py-24 lg:py-32">
|
||||||
|
<div class="container mx-auto prose lg:prose-xl prose-invert">
|
||||||
|
<Why/>
|
||||||
|
</div>
|
||||||
|
</section>
|
||||||
|
</div>
|
||||||
|
</main>
|
||||||
|
</Layout>
|
||||||
|
|
||||||
@@ -0,0 +1,8 @@
|
|||||||
|
import fs from "node:fs/promises";
|
||||||
|
|
||||||
|
const url = new URL("../../../install.sh", import.meta.url);
|
||||||
|
const script = await fs.readFile(url, "utf-8");
|
||||||
|
|
||||||
|
export async function GET() {
|
||||||
|
return new Response(script);
|
||||||
|
}
|
||||||
@@ -0,0 +1,8 @@
|
|||||||
|
import fs from "node:fs/promises";
|
||||||
|
|
||||||
|
const url = new URL("../../../uninstall.sh", import.meta.url);
|
||||||
|
const script = await fs.readFile(url, "utf-8");
|
||||||
|
|
||||||
|
export async function GET() {
|
||||||
|
return new Response(script);
|
||||||
|
}
|
||||||
@@ -0,0 +1,8 @@
|
|||||||
|
/** @type {import('tailwindcss').Config} */
|
||||||
|
export default {
|
||||||
|
content: ["./src/**/*.{astro,html,js,jsx,md,mdx,svelte,ts,tsx,vue}"],
|
||||||
|
theme: {
|
||||||
|
extend: {},
|
||||||
|
},
|
||||||
|
plugins: [require("@tailwindcss/typography")],
|
||||||
|
};
|
||||||
@@ -0,0 +1,3 @@
|
|||||||
|
{
|
||||||
|
"extends": "astro/tsconfigs/strict"
|
||||||
|
}
|
||||||
@@ -0,0 +1,23 @@
|
|||||||
|
use gsf_core::AccelMode;
|
||||||
|
|
||||||
|
#[derive(Debug, PartialEq)]
|
||||||
|
pub enum InputAction {
|
||||||
|
Enter,
|
||||||
|
Focus,
|
||||||
|
Reset,
|
||||||
|
}
|
||||||
|
|
||||||
|
#[derive(Debug, PartialEq)]
|
||||||
|
pub enum Action {
|
||||||
|
Tick,
|
||||||
|
Input(InputAction),
|
||||||
|
SelectNextInput,
|
||||||
|
SelectPreviousInput,
|
||||||
|
SetMode(AccelMode),
|
||||||
|
ScrollDown,
|
||||||
|
ScrollUp,
|
||||||
|
ScrollPageDown,
|
||||||
|
ScrollPageUp,
|
||||||
|
}
|
||||||
|
|
||||||
|
pub type Actions = Vec<Action>;
|
||||||
@@ -0,0 +1,285 @@
|
|||||||
|
use crossterm::terminal::{EnterAlternateScreen, LeaveAlternateScreen};
|
||||||
|
use gsf_core::ALL_COMMON_PARAMS;
|
||||||
|
use gsf_core::ALL_LINEAR_PARAMS;
|
||||||
|
use gsf_core::ALL_MODES;
|
||||||
|
use gsf_core::ALL_NATURAL_PARAMS;
|
||||||
|
use gsf_core::ALL_NOACCEL_PARAMS;
|
||||||
|
use gsf_core::ALL_SYNCHRONOUS_PARAMS;
|
||||||
|
use gsf_core::Param;
|
||||||
|
use gsf_core::get_param_value_from_ctx;
|
||||||
|
use gsf_core::persist::ParamStore;
|
||||||
|
use gsf_core::persist::SysFsStore;
|
||||||
|
use gsf_core::{ALL_PARAMS, AccelMode, ContextRef, TuiContext};
|
||||||
|
use ratatui::Terminal;
|
||||||
|
use ratatui::backend::Backend;
|
||||||
|
use ratatui::crossterm::event::{DisableMouseCapture, EnableMouseCapture, KeyCode, KeyEventKind};
|
||||||
|
use std::{io, time::Instant};
|
||||||
|
use std::{panic, time::Duration};
|
||||||
|
use tracing::debug;
|
||||||
|
|
||||||
|
use crate::action::{Action, Actions};
|
||||||
|
use crate::component::TuiComponent;
|
||||||
|
use crate::event::{Event, EventHandler};
|
||||||
|
use crate::graph::SensitivityGraph;
|
||||||
|
use crate::param_input::ParameterInput;
|
||||||
|
use crate::screen::Screen;
|
||||||
|
use crate::utils::CyclingIdx;
|
||||||
|
|
||||||
|
pub struct App {
|
||||||
|
context: ContextRef<SysFsStore>,
|
||||||
|
screens: Vec<Screen<SysFsStore>>,
|
||||||
|
screen_idx: CyclingIdx,
|
||||||
|
pub(crate) is_running: bool,
|
||||||
|
|
||||||
|
last_tick_at: Instant,
|
||||||
|
}
|
||||||
|
|
||||||
|
pub fn collect_inputs_for_params(
|
||||||
|
params: &[Param],
|
||||||
|
context: ContextRef<SysFsStore>,
|
||||||
|
) -> Vec<ParameterInput<SysFsStore>> {
|
||||||
|
ALL_COMMON_PARAMS
|
||||||
|
.iter()
|
||||||
|
.chain(params)
|
||||||
|
.filter_map(|&p| context.get().parameter(p).copied())
|
||||||
|
.map(|param| ParameterInput::new(¶m, context.clone()))
|
||||||
|
.collect()
|
||||||
|
}
|
||||||
|
|
||||||
|
impl App {
|
||||||
|
pub fn new() -> Self {
|
||||||
|
let context = ContextRef::new(
|
||||||
|
TuiContext::init(SysFsStore, ALL_PARAMS).expect("Failed to initialize the Tui Context"),
|
||||||
|
);
|
||||||
|
|
||||||
|
Self {
|
||||||
|
screens: vec![
|
||||||
|
Screen::new(
|
||||||
|
AccelMode::Linear,
|
||||||
|
collect_inputs_for_params(ALL_LINEAR_PARAMS, context.clone()),
|
||||||
|
Box::new(
|
||||||
|
SensitivityGraph::new(context.clone()).on_y_axix_bounds_update(|ctx| {
|
||||||
|
// Appropriate dynamic bounds for the Linear sens graph
|
||||||
|
let upper_bound = f64::from(get_param_value_from_ctx!(ctx, SensMult))
|
||||||
|
* f64::from(get_param_value_from_ctx!(ctx, OutputCap)).max(1.0)
|
||||||
|
* 2.0;
|
||||||
|
|
||||||
|
[0.0, upper_bound]
|
||||||
|
}),
|
||||||
|
),
|
||||||
|
),
|
||||||
|
Screen::new(
|
||||||
|
AccelMode::Natural,
|
||||||
|
collect_inputs_for_params(ALL_NATURAL_PARAMS, context.clone()),
|
||||||
|
Box::new(
|
||||||
|
SensitivityGraph::new(context.clone()).on_y_axix_bounds_update(|ctx| {
|
||||||
|
// Appropriate dynamic bounds for the Natural sens graph
|
||||||
|
let upper_bound = f64::from(get_param_value_from_ctx!(ctx, SensMult))
|
||||||
|
* f64::from(get_param_value_from_ctx!(ctx, Limit)).max(1.0)
|
||||||
|
* 2.0;
|
||||||
|
|
||||||
|
[0.0, upper_bound]
|
||||||
|
}),
|
||||||
|
),
|
||||||
|
),
|
||||||
|
Screen::new(
|
||||||
|
AccelMode::Synchronous,
|
||||||
|
collect_inputs_for_params(ALL_SYNCHRONOUS_PARAMS, context.clone()),
|
||||||
|
Box::new(
|
||||||
|
SensitivityGraph::new(context.clone()).on_y_axix_bounds_update(|ctx| {
|
||||||
|
// Appropriate dynamic bounds for the Synchronous sens graph
|
||||||
|
let upper_bound = f64::from(get_param_value_from_ctx!(ctx, SensMult))
|
||||||
|
* f64::from(get_param_value_from_ctx!(ctx, Motivity)).max(1.0)
|
||||||
|
* 2.0;
|
||||||
|
|
||||||
|
[0.0, upper_bound]
|
||||||
|
}),
|
||||||
|
),
|
||||||
|
),
|
||||||
|
Screen::new(
|
||||||
|
AccelMode::NoAccel,
|
||||||
|
collect_inputs_for_params(ALL_NOACCEL_PARAMS, context.clone()),
|
||||||
|
Box::new(
|
||||||
|
SensitivityGraph::new(context.clone()).on_y_axix_bounds_update(|ctx| {
|
||||||
|
// Appropriate dynamic bounds for the NoAccel sens graph
|
||||||
|
let upper_bound =
|
||||||
|
f64::from(get_param_value_from_ctx!(ctx, SensMult)) * 2.0; // No other factor, sens is 1.0
|
||||||
|
|
||||||
|
[0.0, upper_bound.max(1.0)] // Ensure at least a small visible range
|
||||||
|
}),
|
||||||
|
),
|
||||||
|
),
|
||||||
|
],
|
||||||
|
screen_idx: CyclingIdx::new_starting_at(
|
||||||
|
ALL_MODES.len(),
|
||||||
|
context.clone().get().current_mode.ordinal() as usize,
|
||||||
|
),
|
||||||
|
context,
|
||||||
|
is_running: true,
|
||||||
|
last_tick_at: Instant::now(),
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub(crate) fn tick(&mut self) -> bool {
|
||||||
|
#[cfg(not(debug_assertions))]
|
||||||
|
let tick_rate = 16;
|
||||||
|
|
||||||
|
#[cfg(debug_assertions)]
|
||||||
|
let tick_rate = 100;
|
||||||
|
|
||||||
|
let do_tick = self.last_tick_at.elapsed() >= Duration::from_millis(tick_rate);
|
||||||
|
do_tick.then(|| {
|
||||||
|
self.last_tick_at = Instant::now();
|
||||||
|
});
|
||||||
|
do_tick
|
||||||
|
}
|
||||||
|
|
||||||
|
fn current_screen_mut(&mut self) -> &mut Screen<SysFsStore> {
|
||||||
|
let screen_idx = self.screen_idx.current();
|
||||||
|
self.screens.get_mut(screen_idx).unwrap_or_else(|| {
|
||||||
|
panic!(
|
||||||
|
"Failed to get a Screen for mode id {}: {:?}",
|
||||||
|
screen_idx, ALL_MODES[screen_idx]
|
||||||
|
);
|
||||||
|
})
|
||||||
|
}
|
||||||
|
|
||||||
|
fn current_screen(&self) -> &Screen<SysFsStore> {
|
||||||
|
let screen_idx = self.screen_idx.current();
|
||||||
|
self.screens.get(screen_idx).unwrap_or_else(|| {
|
||||||
|
panic!(
|
||||||
|
"Failed to get a Screen for mode id {}: {:?}",
|
||||||
|
screen_idx, ALL_MODES[screen_idx]
|
||||||
|
);
|
||||||
|
})
|
||||||
|
}
|
||||||
|
|
||||||
|
fn can_switch_screens(&self) -> bool {
|
||||||
|
self.screens.len() > 1 && !self.current_screen().is_in_editing_mode()
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
impl App {
|
||||||
|
pub(crate) fn handle_event(&mut self, event: &Event, actions: &mut Actions) {
|
||||||
|
debug!("received event: {:?}", event);
|
||||||
|
if let Event::Key(crossterm::event::KeyEvent {
|
||||||
|
kind: KeyEventKind::Press,
|
||||||
|
code,
|
||||||
|
..
|
||||||
|
}) = event
|
||||||
|
{
|
||||||
|
match code {
|
||||||
|
KeyCode::Char('q') => {
|
||||||
|
self.is_running = false;
|
||||||
|
return;
|
||||||
|
}
|
||||||
|
KeyCode::Right => {
|
||||||
|
if self.can_switch_screens() {
|
||||||
|
self.screen_idx.forward();
|
||||||
|
actions.push(Action::SetMode(
|
||||||
|
self.screens[self.screen_idx.current()].accel_mode,
|
||||||
|
));
|
||||||
|
}
|
||||||
|
}
|
||||||
|
KeyCode::Left => {
|
||||||
|
if self.can_switch_screens() {
|
||||||
|
self.screen_idx.back();
|
||||||
|
actions.push(Action::SetMode(
|
||||||
|
self.screens[self.screen_idx.current()].accel_mode,
|
||||||
|
));
|
||||||
|
}
|
||||||
|
}
|
||||||
|
_ => {}
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
self.current_screen_mut().handle_event(event, actions);
|
||||||
|
}
|
||||||
|
|
||||||
|
pub(crate) fn update(&mut self, actions: &mut Vec<Action>) {
|
||||||
|
debug!("performing actions: {actions:?}");
|
||||||
|
|
||||||
|
for action in actions.drain(..) {
|
||||||
|
if let Action::SetMode(accel_mode) = action {
|
||||||
|
self.context.get_mut().current_mode = accel_mode;
|
||||||
|
SysFsStore
|
||||||
|
.set_current_accel_mode(accel_mode)
|
||||||
|
.expect("Failed to set accel mode in TUI");
|
||||||
|
self.context.get_mut().reset_current_parameters();
|
||||||
|
}
|
||||||
|
|
||||||
|
self.current_screen_mut().update(&action);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
pub(crate) fn draw(&self, frame: &mut ratatui::Frame, area: ratatui::prelude::Rect) {
|
||||||
|
self.current_screen().draw(frame, area);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Representation of a terminal user interface.
|
||||||
|
///
|
||||||
|
/// It is responsible for setting up the terminal,
|
||||||
|
/// initializing the interface and handling the draw events.
|
||||||
|
#[derive(Debug)]
|
||||||
|
pub struct Tui<B: Backend> {
|
||||||
|
/// Interface to the Terminal.
|
||||||
|
terminal: Terminal<B>,
|
||||||
|
/// Terminal event handler.
|
||||||
|
pub events: EventHandler,
|
||||||
|
}
|
||||||
|
|
||||||
|
impl<B: Backend> Tui<B> {
|
||||||
|
/// Constructs a new instance of [`Tui`].
|
||||||
|
pub fn new(terminal: Terminal<B>, events: EventHandler) -> Self {
|
||||||
|
Self { terminal, events }
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Initializes the terminal interface.
|
||||||
|
///
|
||||||
|
/// It enables the raw mode and sets terminal properties.
|
||||||
|
pub fn init(&mut self) -> anyhow::Result<()> {
|
||||||
|
crossterm::terminal::enable_raw_mode()?;
|
||||||
|
crossterm::execute!(io::stdout(), EnterAlternateScreen, EnableMouseCapture)?;
|
||||||
|
|
||||||
|
// Define a custom panic hook to reset the terminal properties.
|
||||||
|
// This way, you won't have your terminal messed up if an unexpected error happens.
|
||||||
|
let panic_hook = panic::take_hook();
|
||||||
|
panic::set_hook(Box::new(move |panic| {
|
||||||
|
Self::reset().expect("failed to reset the terminal");
|
||||||
|
panic_hook(panic);
|
||||||
|
}));
|
||||||
|
|
||||||
|
self.terminal.hide_cursor()?;
|
||||||
|
self.terminal.clear()?;
|
||||||
|
Ok(())
|
||||||
|
}
|
||||||
|
|
||||||
|
/// [`Draw`] the terminal interface by [`rendering`] the widgets.
|
||||||
|
///
|
||||||
|
/// [`Draw`]: ratatui::Terminal::draw
|
||||||
|
/// [`rendering`]: crate::ui::render
|
||||||
|
pub fn draw(&mut self, app: &mut App) -> anyhow::Result<()> {
|
||||||
|
self.terminal.draw(|frame| app.draw(frame, frame.area()))?;
|
||||||
|
Ok(())
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Resets the terminal interface.
|
||||||
|
///
|
||||||
|
/// This function is also used for the panic hook to revert
|
||||||
|
/// the terminal properties if unexpected errors occur.
|
||||||
|
fn reset() -> anyhow::Result<()> {
|
||||||
|
crossterm::terminal::disable_raw_mode()?;
|
||||||
|
crossterm::execute!(io::stdout(), LeaveAlternateScreen, DisableMouseCapture)?;
|
||||||
|
Ok(())
|
||||||
|
}
|
||||||
|
|
||||||
|
/// Exits the terminal interface.
|
||||||
|
///
|
||||||
|
/// It disables the raw mode and reverts back the terminal properties.
|
||||||
|
pub fn exit(&mut self) -> anyhow::Result<()> {
|
||||||
|
Self::reset()?;
|
||||||
|
self.terminal.show_cursor()?;
|
||||||
|
Ok(())
|
||||||
|
}
|
||||||
|
}
|
||||||
@@ -0,0 +1,38 @@
|
|||||||
|
use std::fmt::Debug;
|
||||||
|
|
||||||
|
use crossterm::event::{KeyEvent, MouseEvent};
|
||||||
|
use ratatui::{Frame, layout::Rect};
|
||||||
|
|
||||||
|
use super::{
|
||||||
|
action::{Action, Actions},
|
||||||
|
event::Event,
|
||||||
|
};
|
||||||
|
|
||||||
|
pub trait TuiComponent {
|
||||||
|
fn handle_event(&mut self, event: &Event, actions: &mut Actions) {
|
||||||
|
match event {
|
||||||
|
Event::Key(key_event) => self.handle_key_event(key_event, actions),
|
||||||
|
Event::Mouse(mouse_event) => self.handle_mouse_event(mouse_event, actions),
|
||||||
|
}
|
||||||
|
}
|
||||||
|
fn handle_key_event(&mut self, event: &KeyEvent, actions: &mut Actions);
|
||||||
|
fn handle_mouse_event(&mut self, event: &MouseEvent, actions: &mut Actions);
|
||||||
|
|
||||||
|
/// Stuff to do on any action derived from an event
|
||||||
|
fn update(&mut self, action: &Action);
|
||||||
|
|
||||||
|
fn draw(&self, frame: &mut Frame, area: Rect);
|
||||||
|
}
|
||||||
|
|
||||||
|
#[derive(Debug)]
|
||||||
|
pub struct NoopComponent;
|
||||||
|
|
||||||
|
impl TuiComponent for NoopComponent {
|
||||||
|
fn handle_key_event(&mut self, _event: &KeyEvent, _actions: &mut Actions) {}
|
||||||
|
|
||||||
|
fn handle_mouse_event(&mut self, _event: &MouseEvent, _actions: &mut Actions) {}
|
||||||
|
|
||||||
|
fn update(&mut self, _action: &Action) {}
|
||||||
|
|
||||||
|
fn draw(&self, _frame: &mut Frame, _area: Rect) {}
|
||||||
|
}
|
||||||
@@ -0,0 +1,52 @@
|
|||||||
|
use std::sync::mpsc::TryRecvError;
|
||||||
|
|
||||||
|
use crossterm::event::Event as CrosstermEvent;
|
||||||
|
use crossterm::event::MouseEventKind;
|
||||||
|
|
||||||
|
#[derive(Debug)]
|
||||||
|
pub enum Event {
|
||||||
|
Key(crossterm::event::KeyEvent),
|
||||||
|
Mouse(crossterm::event::MouseEvent),
|
||||||
|
}
|
||||||
|
|
||||||
|
#[derive(Debug)]
|
||||||
|
pub struct EventHandler {
|
||||||
|
rx: std::sync::mpsc::Receiver<Event>,
|
||||||
|
}
|
||||||
|
|
||||||
|
impl EventHandler {
|
||||||
|
pub fn new() -> Self {
|
||||||
|
let tick_rate = std::time::Duration::from_millis(33);
|
||||||
|
let (tx, rx) = std::sync::mpsc::channel();
|
||||||
|
std::thread::spawn(move || -> anyhow::Result<()> {
|
||||||
|
loop {
|
||||||
|
if crossterm::event::poll(tick_rate)? {
|
||||||
|
match crossterm::event::read()? {
|
||||||
|
CrosstermEvent::Key(e) => tx.send(Event::Key(e)),
|
||||||
|
CrosstermEvent::Mouse(e) => {
|
||||||
|
if e.kind == MouseEventKind::Moved {
|
||||||
|
// These are annoying because they get buffered
|
||||||
|
// while you move your mouse a bunch and delay
|
||||||
|
// other events, e.g 'q' quitting could much longer than it should.
|
||||||
|
continue;
|
||||||
|
}
|
||||||
|
tx.send(Event::Mouse(e))
|
||||||
|
}
|
||||||
|
CrosstermEvent::Resize(_col, _row) => continue,
|
||||||
|
event => unimplemented!("event {event:?}"),
|
||||||
|
}?
|
||||||
|
}
|
||||||
|
}
|
||||||
|
});
|
||||||
|
|
||||||
|
EventHandler { rx }
|
||||||
|
}
|
||||||
|
|
||||||
|
pub fn next(&self) -> anyhow::Result<Option<Event>> {
|
||||||
|
Ok(match self.rx.try_recv() {
|
||||||
|
Ok(e) => Some(e),
|
||||||
|
Err(TryRecvError::Empty) => None,
|
||||||
|
Err(err) => return Err(err.into()),
|
||||||
|
})
|
||||||
|
}
|
||||||
|
}
|
||||||